
Abstract
Primary navigation systems. Sensor Payload.

Abstract
E N D
Presentation Transcript
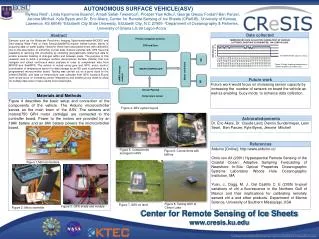
Primary navigation systems Sensor Payload AUTONOMOUS SURFACE VEHICLE(ASV) MyAsia Reid1, Linda Kpormone Buame2, Amadi Sefah-Twerefour2, Prosper Yaw Adiku2, George Owusu Fordah2 Ben Panzer, Jerome Mitchell, Kyle Byers andDr. Eric Akers,Center for Remote Sensing of Ice Sheets (CReSIS), University of Kansas, Lawrence, KS 66045 1Elizabeth City State University, Elizabeth City, N C 27909 2Department of Oceanography & Fisheries, University of Ghana LG 99 Legon-Accra. Abstract Data collected . Sensors such as the Moderate Resolution Imaging Spectroradiometer(MODIS) and Sea-viewing Wide Field of View Sensor(SeaWiFS),require limited human efforts in acquiring data on water quality. However, these have associated errors with calibration due to the assumption of uniformity in pixel data. Surface vehicles with GPS have the capability of resolving this uncertainty by collecting geographically referenced data to enable accurate tracking of changes within and between pixels. The purpose of this research was to build a prototype surface (Autonomous Surface Vehicle) that can navigate and collect continuous water samples in order to complement data from MODIS and SeaWiFS. The vehicle is routed using gyro and GPS, motor control, coordination of temperature sensor for data storage by an SD card is performed by a programmed microcontroller board. Testing was carried out on a pond close to the center(CReSIS) and data on temperature was collected from GPS locations.Future work would focus on increasing sensor integrations and enabling buoy mode to allow for multiple data sets to make results more meaningful. Materials and Methods Figure 4 describes the basic setup and connection of the components of the vehicle. The Arduino microcontroller serves as the main brain of the ASV. The sensors and motors(750 GPH motor cartridge) are connected to the controller board. Power to the motors are provided by an 18Ah battery and an 8Ah battery powers the microcontroller board. M2 Figure 9.Graph showing temperature of various locations at Clinton Lake M1 Future work GPS and Gyro Future work would focus on increasing sensor capacity by increasing the number of sensors on board the vehicle as well as enabling buoy mode to enhance data collection. Acknowledgements uMMC storagemodule Motor controllers Dr. Eric Akers, Dr. Claude Laird, Dennis Sundermeyer, Leon Searl, Ben Panzer, Kyle Byers, Jerome Mitchell MICROCONTROLLER Figure 4. ASV system layout Temperature sensor References Figure 5. Components arranged in ASV Figure 6. Connections with battery Arduino [Online]: http://www.arduino.cc/ Chris von Alt (2001) Hyperspectral Remote Sensing of the Coastal Ocean: Adaptive Sampling Forecasting of Nearshore In-Situ Optical Properties Oceanographic Systems Laboratory Woods Hole Oceanographic Institution, MA Yuan, J., Dagg, M. J., Del Castillo C. E (2005) In-pixel variations of chl a fluorescence in the Northern Gulf of Mexico and their implications for calibrating remotely sensed chl a and other products. Department of Marine Science, University of Southern Mississippi, USA Figure 1.Motorcontrollers Figure 8. Testing ASV at Clinton Lake Figure 7. ASV on land Figure 3. GPS shield and module Figure 2. Micro controller


















