Rocker Simulation for GM Holden Bumper Assembly Optimization
This simulation focuses on the operation of a rocker system designed for a GM Holden bumper assembly line. It includes specifications such as end strokes of 1000mm, with 2140mm travel distance and two strokes per rocker per robot. The motion time is recorded at 0.42 seconds with a speed of 675mm/sec, while the conveyor speed is set at 3.5m/min. The system has an existing layout with multiple coating processes and a cycle time of 60 seconds. This analysis aims to enhance efficiency and productivity within the current plant setup.

Rocker Simulation for GM Holden Bumper Assembly Optimization
E N D
Presentation Transcript
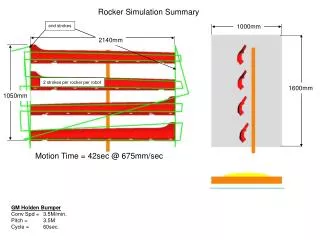
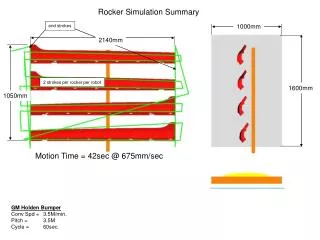
Rocker Simulation Summary 1000mm end strokes 2140mm 2 strokes per rocker per robot 1600mm 1050mm Motion Time = 42sec @ 675mm/sec GM Holden Bumper Conv Spd = 3.5M/min. Pitch = 3.5M Cycle = 60sec.
Existing Plant System Layout AP Base Clear coat 1 backup coat 1 coat 1 coat 1 coat 2 backup GM Holden Bumper Conv Spd = 3.5M/min. Pitch = 3.5M Cycle = 60sec.