Download
1 / 1
10 likes | 175 Vues
Visual Object Tracking Using Particle Filters : A Survey Satarupa Mukherjee Department of Computing Science, University of Alberta, Edmonton, Canada satarupa@ualberta.ca. Submission ID: 23. Use of Particle Filter in Multi-target “Track Before Detect” Application . Introduction.

E N D
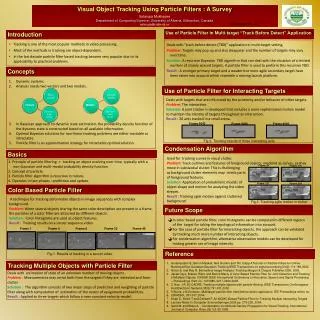
Visual Object Tracking Using Particle Filters : A Survey SatarupaMukherjee Department of Computing Science, University of Alberta, Edmonton, Canada satarupa@ualberta.ca Submission ID: 23 Use of Particle Filter in Multi-target “Track Before Detect” Application Introduction • Tracking is one of the most popular methods in video processing. • Most of the methods in tracking are object-dependent. • In the last decade particle filter based tracking became very popular due to its applicability to practical problems. Deals with “track before detect (TBD)” application in multi-target setting. Problem: Targets may pop up and also disappear and the number of targets may vary over time. Solution: A recursive Bayesian TBD algorithm that can deal with the situation of a limited number of closely spaced targets. A particle filter is used to perform this recursive TBD. Result : A stronger primary target and a weaker but more agile secondary target have been taken into account which resemble a moving launch platform. Concepts • Dynamic systems. • Analysis needs two vectors and two models. • 3. In Bayesian approach to dynamic state estimation, the probability density function of the dynamic state is constructed based on all available information. • Optimal Bayesian solutions for non-linear tracking problems are either tractable or intractable. • Particle filter is an approximation strategy for intractable optimal solution. Vectors Models Use of Particle Filter for Interacting Targets Deals with targets that are influenced by the proximity and/or behavior of other targets. Problem: The interaction. Solution: A joint tracker is developed that includes a more sophisticated motion model to maintain the identity of targets throughout an interaction. Result : 20 ants tracked in a small arena. Frame 9043 Frame 9080 Frame 9083 Fig.2. Tracking results of three interacting ants Condensation Algorithm Basics Used for tracking curves in visual clutter. Problem: Track outlines and features of foreground objects, modeled as curves, as they move in substantial clutter. This is challenging as background clutter elements may mimic parts of foreground features. Solution: Application of probabilistic models of object shape and motion for analyzing the video stream. Result : Tracking agile motion against cluttered background. 1. Principle of particle filtering -> tracking an object evolving over time, typically with a non-Gaussian and multi-modal probability density function. 2. Concept of particle. 3. Particle filter algorithm is recursive in nature. 4. Operates in two phases : prediction and update. Frame 91 Frame 121 Color Based Particle Filter Frame 265 Frame 221 Fig.3. Tracking agile motion in clutter Future Scope In color based particle filter, color histograms can be computed in different regions of the target for taking the topological information into account. For the case of particle filter for interacting objects, the approach can be validated by tracking much more number of interacting objects. For condensation algorithm, alternative observation models can be developed for making greater use of image intensity. Frame 1 Frame 4 Frame 8 Frame 33 Frame 40 Reference Fig.1. Results of tracking in a soccer video. ArulampalamS.,SimonMaskell, Neil Gordon and Tim Clapp A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking IEEE Transactions on signal processing,50(2):174-188,2002. Acton S. and Ray N. Biomedical image Analysis: Tracking Morgan & ClaypolPublisher,USA, 2006. JacekCzyz, BrankoRistic and Benoit Macq, A Color-Based Particle Filter for Joint Detection and Tracking of Multiple Objects. ICASSP, IEEE International Conference on Acoustics, Speech and Signal Processing – Proceedings II:art. no. 1415380, II217-II220,2005. C Hue, J-P. LE CADRE, Tracking multiple objects with particle filtering. IEEE Transactions On Aerospace And Electronic Systems,38(3):791-811,2002. Y.Boers, J.N.Dreissen, Multitarget particle filter track before detect application. IEE Proceedings online no. 20040841, 351-357,2004. Khan Z., Balch T and Dellaert F. An MCMC-Based Particle Filter for Tracking Multiple Interacting Targets Lecture Notes in Computer ScienceSpringer,3024:pp. 279-290, 2004. Isard M. and Blake A. , Condensation-Conditional Density Propagation for Visual Tracking. International Journal of Computer Vison,29(1):5-28,1998. Tracking Multiple Objects with Particle Filter A technique for tracking deformable objects in image sequences with complex background. Problem: When several objects sharing the same color description are present in a frame, the particles of a color filter are attracted by different objects. Solution : Color histograms are used as object features. Result : Tracking results on a soccer sequence video. Deals with estimation of state of an unknown number of moving objects . Problem : Measurements may arrive both from the targets if they are detected and from clutter. Solution : The algorithm consists of two major steps of prediction and weighting of particle filter along with computation of estimation of the vector of assignment probabilities. Result : Applied to three targets which follow a near-constant-velocity model.