Exploring Signal Processing: Applications, Concepts, and Development
410 likes | 509 Vues
Dive into the world of signal processing, from converting signals to exploring applications in imaging, AI, communications, and more. Discover how machines produce and recognize speech, and learn about DSP and AI classes.

Exploring Signal Processing: Applications, Concepts, and Development
E N D
Presentation Transcript
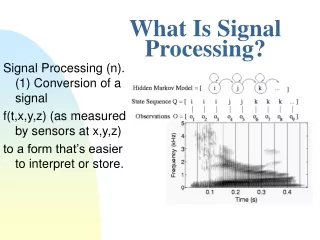
What Is Signal Processing? Signal Processing (n). (1) Conversion of a signal f(t,x,y,z) (as measured by sensors at x,y,z) to a form that’s easier to interpret or store.
What Can I do with Signal Processing? Imaging (biomedical imaging, satellite remote sensing, distributed sensor networks, acoustic beamforming) Data Security (cryptography, watermarking) Communications (DSP implementation of modulators & error-correction codes at IF, RF, and even OF) Artificial Intelligence (computer vision, audiovisual scene understanding, speech recognition, cognitive world modeling) Data Mining (image recognition, audio recognition, audio & visual similarity measurement)
Useful Signal Processing Classes Core DSP Classes: ECE 310 (DSP), 320 (DSP Lab), 313 (Probability), 359 (Communications I) Artificial Intelligence/ Pattern Recognition DSP: ECE 302 (Music Synthesis),ECE 348 (Artificial Intelligence) ECE 370 (Robotics), ECE 386 (Controls), ECE 389 (Robot Dynamics) Communications/ Digital Modulation: ECE 338 (Communication Networks), ECE 361 (Communications II)
Where can I go with Signal Processing? Universities (Texas A&M, University of Maryland) DSP Companies (Motorola, TI) Communications Companies (Motorola, Rockwell, Boeing) Audio Companies (Shure, Nuance) Medical Imaging Companies (GE, Siemens)
I. What Can Machines Do Now? - Telephone-based Dialog Systems - Dictation for Word Processing - Speech I/O for Disabled Users - Speech I/O for Busy Users (e.g. Radiologists) - Hands-free GPS in new Jaguar
II. What Can People Do That Machines Can’t Do? - Two Voices at Once (TV is on --- why can’t I talk to my toaster?) - Reverberation (Do I need to put padding on all of the walls?) - Noise (automobile, street)
II. Example 2: Reverberation - Recorded speech equals input(t-delay 1) + input(t-delay 2) - Delays are longer than a vowel, so two different vowels get mixed together - Result: Just like 2 different speakers!!
II. Example 2: Reverberation The Only Way to Totally Avoid Reverberation:
Classification: Choose the “most probable” C C = argmax p(C|O) = argmax p(O|C) p(C) / p(O) = argmax p(O|C) p(C) p(C) --- the “language model” p(O|C) --- the “acoustic model” III. “Statistical” Speech Recognition
IV. Hidden Markov Model Maximize p(O,Q) = p(i) p(o1|i) p(i|i) p(o2|i) p(i|i) p(o3|i) p(j|i) p(o4|j) ...
IV. Response Generation Database Response: 12 flights Priority Ranking of Information: 1. Destination City 2. Origin City 3. Date 4. Price ….. Response Generation: “There are 12 flights tomorrow morning from Champaign to San Francisco. What price range would you like to consider?”
IV. Step 1:a. CreateAcoustic Targetsb. ConvertAcoustic Goalsto Movement Goals--- just like arobot controlproblem
IV. Step 4: Mechanical Pseudo-Fourier Transform
IV. Step 6: Beam-Forming --- Correlate Signals from 2 Ears ---
Conclusions • Telephone Speech Technology in Limited Domains works well. • Speech Recognition doesn’t understand • Multiple Voices • Reverberation • Other kinds of variability, e.g. accents • Better Speech Technology can be produced by learning from Human Speech Procesing
Background: Stop Cons. Release • Three “Places of Articulation:” • Lips (b,p) • Tongue Blade (d,t) • Tongue Body (g,k)
Problem Statement: Content of Speech is Multivariate 1. Source Information: Prosody, Articulatory Features
Content of Speech is Multivariate 2. Useful Non-Source Information: Composite Acoustic Cues
Types of Measurement Error • Small Errors: Spectral Perturbation • Large Errors: Pick the Wrong Peak Amp. (dB) Frequency (Hertz)
Large Errors are 20% of Total Std Dev of Small Errors = 45-72 Hz Std Dev of Large Errors = 218-1330 Hz P(Large Error) = 0.17-0.22 LogPDF Measurement Error (Hertz) re: Manual Transcriptions
Measurement Error Predicts Classification Error
Solution: Composite Cues as State Variables
a PosterioriMeasurement Distributions:10ms After /d/ in “dark” DFT Amplitude DFT Convexity P(F | O, Q) Frequency (0-4000 Hertz)
MRI Image Collection • GE Signa 1.5T • T1-weighted • 3mm slices • 24 cm FOV • 256 x 256 pixels • Coronal, Axial • 3 Subjects • 11 Vowels • Breath-hold in • vowel position • for 25 seconds
MRI Image Segmentation • In CTMRedit: • Manual • Seeded Region • Growing • Tested: • Snake • Structural • Saliency