
第八章 目标表达和描述
第八章 目标表达和描述. 一、目标表达和描述的概述 一般而言,表达和描述之间并没有明显得界限。 对某个人的表达可以是:姓名、性别、身份证号码 …… ; 对其的描述可以是:工作单位、性格、与周边人的关系、等。 对图像而言,我们常常看到的表达与描述是 f(x,y) 。但对于机器的自动化处理而言,这种表达与描述不利于工作的执行。例如: CAD 中的图形 …… 等; 图像处理的一个重要目的是模式识别,将图像中的目标提取出来与已知的目标进行比较。如何才能让机器自动地进行分类和识别并指导下一步的工作,是图像处理应用中的重要组成部分。如军事、工业、农业 …… 等应用领域。.

第八章 目标表达和描述
E N D
Presentation Transcript
第八章 目标表达和描述 一、目标表达和描述的概述 一般而言,表达和描述之间并没有明显得界限。 对某个人的表达可以是:姓名、性别、身份证号码……; 对其的描述可以是:工作单位、性格、与周边人的关系、等。 对图像而言,我们常常看到的表达与描述是f(x,y)。但对于机器的自动化处理而言,这种表达与描述不利于工作的执行。例如:CAD中的图形……等; 图像处理的一个重要目的是模式识别,将图像中的目标提取出来与已知的目标进行比较。如何才能让机器自动地进行分类和识别并指导下一步的工作,是图像处理应用中的重要组成部分。如军事、工业、农业……等应用领域。
对图像进行分割后,将图像分成了若干个区域,包括不同特征的物体和背景,其中可能包含某些形状,如长方形、圆、曲线及任意形状的区域。对图像进行分割后,将图像分成了若干个区域,包括不同特征的物体和背景,其中可能包含某些形状,如长方形、圆、曲线及任意形状的区域。 • 分割完成后,下一步就是用数据、符号、形式语言来表示这些具有不同特征的小区,这就是目标表达。 • 以特征为基础进行区别或分类是计算机理解景物的基础。图像区域的描述可以分为对区域本身的描述和区域之间的关系、结构进行描述。 • 这些描述包括对线、曲线、区域、几何特征等各种形式的描述,是图像处理的基础技术。 目标表达和描述,包括边界和区域的表达、边界和区域的描述。
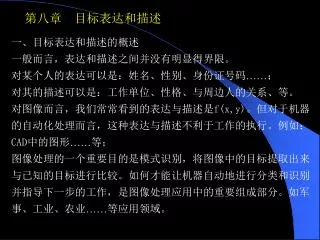
0 7 1 2 1 0 3 1 3 6 1 2 3 2 5 0 4 0 2 4 5 7 3 6 二、边界表达 1链码:定义4-方向和8-方向方向数如下 1 0 2 3 32107654 由方向数组成的数字串——链码。 假设边界链码从最左下点边界点开始,这个点有八个相邻点,其中至少有一个是边界点。边界链码为从当前点到下一个边界点的相邻方向编码。这八个相邻方向可以用0到7来表示。这样一个物体的边界便可以用一个起始点的坐标和一个方向编码的序列来表示。
0 1 0 1 0 3 3 2 2 3 2 2 1 0 1 0 3 0 1 0 3 3 2 2 1 3 3 2 2 1 0 1 0 0 3 1 3 1 0 0 3 3 1 1 2 2 2 2 链码的特点 用边界链码来表示一个目标,我们就可以只用一个起始点的(x, y)坐标和每个边界点3-bit(0-7)的存储量来存贮一个目标的信息,包括目标的位置、周长(大小)和形状特征等信息。 存在的问题 如此产生的码串会很长; 由于噪声的干扰会使链码发生改变; 当起点或目标发生旋转发生变化时,链码会发生变化。
0 0 3 1 3 1 0 0 3 3 1 1 2 2 2 2 0 0 0 3 1 3 0 1 0 3 3 2 2 1 1 2 1 0 0 3 3 2 1 0 2 3 3 1 1 2 2 2 问题的解决 链码的起点归一化:将链码看成一自然数,选择所有可能起点的链码表达中,自然数最小的链码作为该目标的边界表达。 • 1 0 1 0 3 3 2 2 • 3 2 2 1 0 1 0 3 • 0 1 0 3 3 2 2 1 • 3 3 2 2 1 0 1 0 这样可以保证在图像中的任何位置都可以准确重现目标。 对目标的旋 转而言:
0 0 0 3 1 3 1 0 2 3 3 1 1 2 2 2 采用差分码表示——某一点上方向数相差的步数 如果采用差分码表示目标边界,则无论目标如何旋转,链码保持不变。 计算方法:差分码等于将原来的方向数表示的方向逆时针(后向差分)旋转到下一个方向数所表示的方向所需的旋转步数;也可以采用前向差分码。 以4-方向数为例: 原来的方向数 一般链码: 0 1 0 3 3 2 2 1 后向差分: 1 3 3 0 3 0 3 3 前向差分: 3 1 1 0 1 0 1 1 一般链码: 1 2 1 0 0 3 3 2 后向差分: 1 3 3 0 3 0 3 3 前向差分: 3 1 1 0 1 0 1 1 下一个方向数
2、边界段P220 对于某些对称目标的边界表达,如果采用链码来表达数据量比较大。如果将边界分成若干段来表示,会减少边界的表达复杂度。 利用最小凸形的概念,找到边界分段点,而后再利用各种可行的边界表达方法对分段边界进行表达。例如用拟合曲线方程来表达: 设曲线上的点形成点集(xi,yi),若这些点顺序排列,用其坐标(xi,yi)描述的曲线能成一定的函数关系y=f(x),则构造y的估计: 若能用某种准则,例如平方差准则,使其偏差最小,有: 解联立方程组求得系数a0~an,最终得到边界的表达y=f(x)。
3、多边形 用多边形去逼近边界,可以达到任意精度。 1)、基于收缩的最小周长多边形法;P221 2)、基于聚合的最小均方差误差线段逼近法; 设以a为起点用直线依次连接该点与相邻的边界点;分别计算直线与边界的(逼近)拟合误差;或用更简单的方法,使用最远边界点到直线的距离来代表测量误差。 h g f a e b c d 若误差大于某个给定值后,将该直线的前一条直线定为多边形的一条边,并从该线段的另一端点为起点重复上述过程,直至形成一个完整的多边形。
h g j f a i e b c d 3)、基于分裂的最小均方差误差线段逼近法; 选择边界点中相距最远的两点连一直线——用直线代表边界。设该直线为ag。 求取直线与边界的(逼近)拟合误差;或用更简单的方法,使用最远边界点到直线的距离来代表测量误差。 若误差大于某个给定值后,将该最远边界点定为多边形一个顶点连接ad、dg、ah、gh; 形成四边形adgh。重复上述步骤, 直至最远边界点到直线的 距离小于给定值而不能在 分裂为止。
r(θ)=A r(θ)=Asec θ r r θ θ 0 0 θ θ 0 0 2π 2π 4、标记 基本思想:将一个二维边界用一维的较易描述的函数形式来表达。比较适用于固定的图形,例如机械CAD中的图形:圆、椭圆、方以及对其剪切而生成的图形。 A 随着对图形的放大或旋转,标记会发生变化。这种变化可通过某种算法来解决。
E 1 2 A A B C D A B 3 4 E C D 5 6 C 7 8 1 2 3 4 5 6 7 8 三、区域表达 1、空间占有数组 最简单、直观、方便。 2、四叉树
3、骨架 将一个平面区域简化成图是一种重要地区域表达方法。中轴变换是一种骨架化的方法。中轴是和边界上至少两点相切的圆的圆心的轨迹。可以用火烧草场来说明,设物体区域上铺满了草料,火从物体边界同时均匀地烧起,最后草场全部烧光火熄灭的地方就是它的骨骼或骨架。 由此可见,每个骨架点保持了其与边界点距离最小的性质。
一种二值目标区域骨架化算法 已知条件:目标已被分割出来并标记完毕;目标点标记为1,背景点标记为0。定义边界点是本身标记为1而其8-连通域中至少有一个标记为0的点。 1)、首先标记同时满足下列条件的边界点: • 2≤N(P1)≤6 - 非0邻域点的个数 • S(P1)=1 -按顺序 P2-P9P2,0→1的变化次数 • P2• P4• P6=0 且 P4• P6• P8=0 当对所有的边界点都检验完毕后,将所有按上述条件标记了的点去除。 2)、同第一步,但将“与”条件改为如下条件。检验完成后,将所有按条件标记了的点去除。 • P2• P4• P8=0 且 P2• P6• P8=0
操作图示 P2• P4• P6=0 P4• P6• P8=0 P2• P4• P8=0 P2• P6• P8=0
四、边界描述 1、边界长度 对于区域R来说,它的每一个边界点P都应满足两个条件:①P本身属于区域R;②P的邻域中有像素不属于区域R。 如果区域R的内部点是用8-方向连通来判定的(8个领域点均属R),得到的边界为4-方向连通的。 如果区域R的内部点是用4-方向连通来判定的,得到的边界为8-方向连通的。 如果不按规则?点会出问题:既属于边界点又属于内部点 8-方向连通 4-方向连通 ?
边界长度的计算 8-方向连通 4-方向连通 4-方向连通边界长度 =11 8-方向连通 边界长度 =8+2*1.414 2、边界直径 (0,0) 所谓边界直径是指边界上相隔最远的两点之间的距离。 DiaE(B)={(0-5) 2+(4-1) 2}1/2 =341/2 =5.83 Dia4(B)=|0-5|+|4-1|=8 Dia8(B)=max{|0-5|,|4-1|}=5
(0,0) 3 、曲率 曲率是描述曲线弯曲度的一个参 数。在边界描述中可以借助这一 参数来描述边界。 规定:顺时针对边界各点进行标 记。曲率园在边界外的点标记大于0;曲率园在边界内的点标记小于0;直线标记0。 4、形状数 在上一节,我们讲过链码,和差分码。形状数是所有可能的差分码中最小的一组差分码。
f(r) r 5、矩 将曲线分成若干段,对每一段 而言,求其矩: 各阶矩的值与曲线有直接的关系。 6、傅立叶描述符 考虑一个由N个点组成的封闭边界, 从任一一点绕边界一周,构造一个 复数序列: jv u
s(k)的离散傅立叶变换为: S(w)称为边界的傅立叶描述,其反变换为: 边界是多种多样的由于分割技术的不同,由可能是毛刺众多。如果我们仅取边界的傅立叶描述的前M项的傅立叶反变换——及低频部分,则既可以有效地虑除毛刺,又可以比较精确地近似勾画边界的轮廓。
五、区域描述 1、简单描述符 1)、区域面积——多种计算方法 2)、区域重心 按像素数 A=10 按像素中心距离 A=3*3/2=4.5 按像素座标 A=4*4/2=8 x、y为坐标值 A为面积值
Bird Bird C=1 C=2 C=1 C=1 H=2 H=0 H=0 H=1 E=-1 E=2 E=1 E=0 3)、区域灰度 用区域(目标)中的:灰度(颜色分量)的最大值、最小值、平均值、中值、方差等参数来描述目标。 2、拓扑描述符 这种描述不受图形的变形的影响。 如图所示的两个区域,尽管它们有 不同的颜色、面积……,但拓扑描 述是一样的。 对一个给定平面区域而言,定义连 组元内的孔数为H;连通组元的个 数为C。欧拉数:E=C-H
3、形状描述符 1)、形状参数 形状参数F是根据区域的周长B和区域的面积A计算出来的。如果一个连续区域为园形时F=1,当区域为其它形状时F > 1: 形状数相同的区域,区域的形状有可能不同。 所有的周长和面积:B=12 A=5 所有的形状数 F=28.8
2)、偏心率 动力学告诉我们,一个刚体(匀质)绕某一个轴线L转动时的转动惯量I可以表示为: 如果L通过坐标系原点,且方向余弦为α、β、γ,则I可以写成: 此方程是一椭球方程,沿转动轴的任一切面均为一椭圆。椭圆的长半轴长p和短半轴长q可以由下式求出:
q p ri rc 定义:p/q为偏心率 3)、球状性 定义球状性S由下式表示: ri是内切园的半径; rc是内切园的半径; 圆心为目标图形的重心。 o
4)、园形性 定义球状性C由下式表示: μR为区域重心到边界点的平均距离; σR为从区域重心到边界点的距离的均方差。 式中,K为边界点数。
4、纹理描述符 什么是纹理——纹理是图像中一个重要而又难于描述的特征,至今还没有精确的纹理定义。 纹理图像在局部区域内呈现了不规则性,而在整体上表现出某种规律性。 纹理的组成——一是组成图像纹理的基元,另一个是这些基元之间的空间分布关系。 纹理基元的空间排列可能是随机的,也可能是相互之间互相依赖,这种依赖性可能是有结构的,也可能是按某种概率分布排列的,也可能是某种函数形式的。 纹理的描述——图像纹理可以定性用许多词汇来描述,如粗糙、精细、光滑、方向性、规则性和粒度等等。
1)、统计分析方法 从图像有关属性的统计分析出发 ——共生矩阵 由于纹理的存在,像素间存在着某种重复关系。 定义共生矩阵P为: #表示个数。S为目标R中具有特定空间联系的像素对的集合——R的某个子集。 等号右边的分子是具有某种空间关系、灰度值分别为g1和g2的像素对的个数,分母为像素对的总和个数。 可见,共生矩阵的元素是根据给定条件下的像素对出现的概率。
例:位置算子和共生矩阵 所谓位置算子就是产生像素对的规则。对如下图像而言定义位置算子为“由当前像素和向右一个像素且向下的一个像素构成的一个像素对”——可根据图像特点自主定义。 由于图像只有3个灰度级,设将3个灰度级全部考虑——也可根据需要,考虑其中的两个。 构造满足位置算子 的像素对个数矩阵
在此例中,满足位置算子的像素对的总数为16个。在此例中,满足位置算子的像素对的总数为16个。 因此,共生矩阵为: 基于共生矩阵P,可以定义和计算几个常用的纹理描述符,即纹理二阶矩WM、熵WE、对比度WC和均匀性WH:
2)、结构分析方法 找出纹理基元以后再从结构组成上探索纹理的规律,通过纹理之间的关系来描述纹理;也可以直接去探求纹理构成的结构规律。 3)、频谱法 对一些具有明显周期纹理的图像可以用频谱法来对其进行描述 对图像进行傅立叶变换; 对频谱“图像”,S(w)用极座标以频域的原点为极点将其表示为S(r,θ); 构造描述:
5、不变矩 可以证明:mpq唯一地被f(x,y)所确定;反之, mpq也唯一地确定了f(x,y)。 定义f(x,y)的p+q阶矩为: 定义f(x,y)的p+q阶中心矩为: 其中: 构造归一化中心矩: 构造不变矩对图像进行描述。 通过各类不变矩,可以进行图像的描述、匹配和识别。 见例P240。