Assembling the CheapBot Line Follower
140 likes | 165 Vues
Assembling the CheapBot Line Follower. In 8 easy steps. Schematic. Step by Step. The bare PCB. Step 1. Add Resistors. Step 2. Add IR LEDs. Step 3. Add Phototransistors. Line Follower with IR LEDs and Phototransistors. Step 4. Solder the Interface Cable using the strain relief holes.

Assembling the CheapBot Line Follower
E N D
Presentation Transcript
Assembling the CheapBot Line Follower In 8 easy steps
Step by Step • The bare PCB
Step 1 • Add Resistors
Step 2 • Add IR LEDs
Step 3 • Add Phototransistors
Step 4 • Solder the Interface Cable using the strain relief holes
Note • Function of the Interface Cable header pins
Step 5 • Attach two plastic bumpers using four sheet metal screws
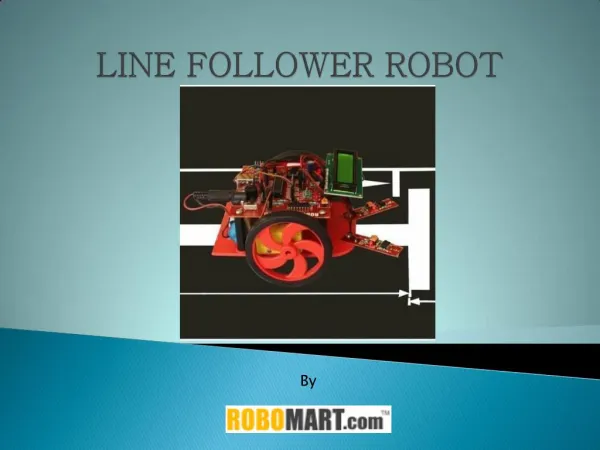
Step 6 • Attach line follower to the bottom of the robot
Step 7 • Plug in the Interface Cable
Test the Behavior of the Line Follower SYMBOL Detectors = B0 SYMBOL RightDetect = BIT0 SYMBOL LeftDetect = BIT1 Line_Finder_Check: Detectors = 0 RightDetect = PINC.0 LeftDetect = PINC.1 DEBUG GOTO Line_Finder_Check
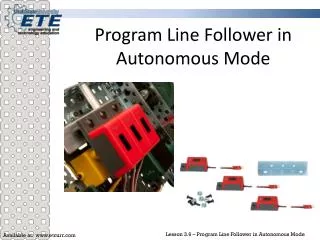
Step 8 • Write the line follower program • Drive the robot forward • Check both sides of the line follower • Steer which ever way detects the black line • Repeat until both sides of line detector see black