Download
1 / 8
80 likes | 208 Vues
This document outlines a detailed roadmap for the Surveillance Micro Air Vehicle (MAV) project, covering all phases from initial design concepts to final testing and validation. It includes objectives such as flight distance capabilities, camera functionality, and control systems requirements. Key focus areas also include aerodynamics, stability, manufacturability, and connectivity. The roadmap emphasizes multidisciplinary collaboration, with contributions from propulsion, electronics, and aerodynamics teams to ensure successful project outcomes. Specific tests and material requirements are outlined to ensure design integrity and functionality.

E N D
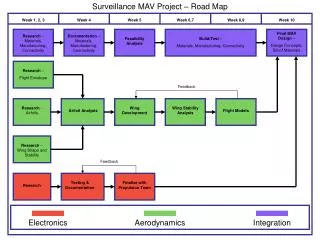
Surveillance MAV Project – Road Map Week 1, 2, 3 Week 4 Week 5 Week 6,7 Week 8,9 Week 10 Final MAV Design – Design Concepts, Bill of Materials Research – Materials, Manufacturing, Connectivity Documentation – Materials, Manufacturing, Connectivity Feasibility Analysis Build/Test – Materials, Manufacturing, Connectivity Research – Flight Envelope Feedback Research - Airfoils Wing Development Wing Stability Analysis Airfoil Analysis Flight Models Research – Wing Shape and Stability Feedback Testing & Documentation Finalize with Propulsion Team Research Electronics Aerodynamics Integration
Surveillance MAV Project – Objectives List Necessary Desirable Able to fly 600 meters (linear) Able to fly 1.2 kilometers or more Able to take a “legible” picture of a 1.5 square-meter symbol located on the ground Able to rotate camera Autonomous flight Wireless remote control (human operator) GPS Stability Augmentation System Stay within budget (~$4500) Use Fall/Winter Senior Design Team’s Propulsion System/Data Stable, consistent launching Able to be flown accurately 500 meters from the target symbol MAV able to be reproduced consistently Must be durable Smallest possible maximum linear dimension Must be able to deliver a hard copy of the photo to judges within 45 minutes of launch Lightest possible weight Black and white photo Color photo Onboard power supply Capture and record video onboard Capture and transmit live video
Surveillance MAV Project – Objective Tree The MAV must complete the mission outlined by the IMAVC. Electronics Aerodynamics Integration MAV Picture Stability Size Propulsion Lift/Drag Remote Control Endurance Size Size Manufacturability Endurance Endurance Connectivity See Requirements See Requirements See Requirements
Surveillance MAV Project – Requirements Aerodynamics Integration Electronics Stability Picture • Must be stable in pitch, yaw, roll • Aircraft will have a positive pitching moment intercept and a negative slope • Elevons shall be effective in controlling pitch rates • Aircraft shall be critically damped in yaw direction • Aircraft yawing moment curve must be positive and 0 intercept • Aircraft shall have a negative rolling moment and 0 intercept • Elevons shall be effective in controlling roll rates • Force on control surfaces shall not exceed force provided by servo • The CG shall be located to ensure stability • Elevon operation shall have minimal effect on yaw Size • Take photo • Record photo • Transmit photo • Receive photo • As small and compact as possible, but still able to carry all necessary components Propulsion Endurance - Minimize power consumption • Drop test (10’ vertical drop) • Static load test • Failure • Pod shock/compression test • ANSYS models Remote Control • Radio • Receiver Lift/Drag Manufacturability - Planform must minimize tip vortices • Construction tools • Feasibility • Material documentation/knowledge/experience Size Size - As small and compact as possible (within the scope of the project) - Planform that optimizes lift for small maximum linear dimension Connectivity Endurance Endurance • Connect wing to pod • Shear landing test • Sufficient battery • Lasting parts - Maintain stability/lift/drag for the duration of the flight
Surveillance MAV Project – Specifications Aerodynamics Integration Electronics Stability Picture • Aircraft will have a positive pitching moment intercept and a negative slope • Elevons shall be effective in controlling pitch rates • Aircraft shall be critically damped in yaw direction • Aircraft yawing moment curve must be positive and 0 intercept • Aircraft shall have a negative rolling moment and 0 intercept • Elevons shall be effective in controlling roll rates • Force on control surfaces shall not exceed force provided by servo • The CG shall be located to ensure stability • Elevon operation shall have minimal effect on yaw Size • Camera (5 or 11 volts) • Laptop (5 GB storage) • Transmitter (2.4 Ghz, 80 mwatts, 5 or 11 volts) • Receiver (2.4 Ghz) • Large enough to carry all components • As small and compact as possible Propulsion Endurance - Minimize power consumption • Drop test (10’ vertical drop) • Static load (G test) • Failure • Pod shock/compression test • ANSYS models Remote Control • Radio • Receiver (2.4 Ghz) Manufacturability Lift/Drag • Construction tools • Feasibility • Material documentation/knowledge/experience Size Size - As small and compact as possible - Plan form that optimizes lift for small maximum linear dimension Connectivity Endurance Endurance • Connect wing to pod • Shear landing test • Sufficient battery • Lasting parts - Maintain stability/lift/drag for the duration of the flight
Surveillance MAV Project – Morphological Analysis 04 06 01 02 03 05 07 08 09 10 11 12 Remote Control (Computer/Human Operator) Autonomo-us None Remote Control (Human Operator) Stability Augmenta-tion Control Lithium Polymer Battery Gas Microturbi-ne Alkaline Batteries Capacitor Power Camera with Film Storage Camera with Digital Storage Camera with Transmitter Infrared Camera with Transmitter Night Vision Camera with Transmitter Movable Camera with Transmitter Camera System Shrink-wrap Tissue Paper Parylene Resin/Epo-xy Mylar Durobotics Fabric Polymers Latex Chemical Resin Dip Fiberglass Skin Compress-ed Air Electric Motor/Pro-pellor Gas Motor/Pro-pellor Ornithopter Electric Motor/Pro-pellor/Shr-oud Propu-lsion Polymers Rapid Prototyping Durobotics Kevlar Carbon Fiber Fiberglass Composite Rods Composite Tow Kevlar/Ca-rbon Combo Titanium Alloy Balsa Foam Wing/ Pod Rudders Spoilers Morphing Thrust Vectoring (Drag) Differential Morphing Elevon Movable C.G. None Flight - Yaw Thrust Elevator Elevons Thrust Vectoring Morphing Movable C.G. Flight - Pitch Elevons Morphing Flaperons Ailerons Thrust Vectoring Spoilers Movable C.G. Flight - Roll
Surveillance MAV Project – QFD Analysis (Phase I) Key 0 = not important 1 = merely desirable 3 = important 9 = very important 0 = not correlated 1 = slightly correlated 3 = correlated 9 = highly correlated Key Frequency (Ghz) 1 1 9 1 0 1 0 9 3 2.4 Thrust (lbs) 0 9 0 0 1 3 3 1 0 3 Power (mA) 9 1 9 3 9 3 1 1 0 1 9 Engineering Metrics Resolution (pixels) 1 0 0 0 9 0 3 0 0 0 1 1 Dimensions (inches) 1 1 0 0 1 0 0 1 3 3 1 0 3 Weight (g) 0 1 0 1 1 0 0 1 3 3 1 0 3 3 Customer Weight 9 9 9 9 1 3 3 9 9 Power (mA) Voice of the Customer Dimensions (inches) Thrust (lbs) Frequency (Ghz) Optimization Weight (g) Resolution (pixels) Customer Requirements Technical Target Able to fly 600 meters (linear) Able to take a “legible” picture Wireless remote control Stay within budget Stable, consistent launching Able to be flown accurately Must be durable Must provide hard copy of photo Onboard power supply