Chapter 2: Determining position
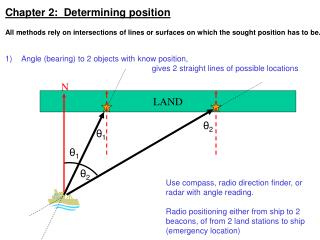
Chapter 2: Determining position All methods rely on intersections of lines or surfaces on which the sought position has to be. Angle (bearing) to 2 objects with know position, gives 2 straight lines of possible locations. N.

Chapter 2: Determining position
E N D
Presentation Transcript
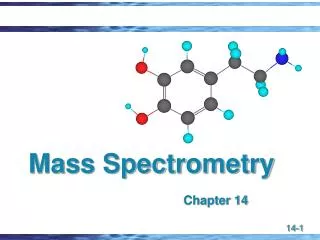
Chapter 2: Determining position • All methods rely on intersections of lines or surfaces on which the sought position has to be. • Angle (bearing) to 2 objects with know position, • gives 2 straight lines of possible locations N LAND θ2 θ1 θ1 θ2 Use compass, radio direction finder, or radar with angle reading. Radio positioning either from ship to 2 beacons, of from 2 land stations to ship (emergency location)
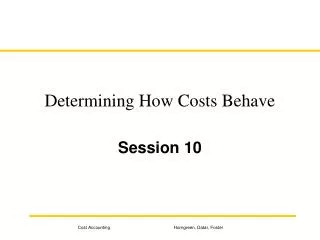
2) Angle (bearing) and distance to 1 object with know position, gives 1 straight line and 1 circle of possible locations N LAND θ2 10km θ2 Use compass, radio direction finder, or radar with angle reading for direction. Use radar or height of objects for distance
Astronomical navigation: • Measure maximum height above horizon of sun, moon, star (meridian transit) • geographic latitude Accurate timing of this event (needs good clocks) geographic longitude
Hyperbola methods: • Two transmitters send out synchronized signals and receivers determines the • DIFFERENCE in arrival time, i.e. the DIFFERENCE in distance. • Examples, still existing in coastal regions, are the DECCA, LORAN, OMEGA systems. • DECCA LORAN OMEGA • Range 300-400nm 1000nm 6000nm • Accuracy 0.5nm 1-5nm 1-2nm
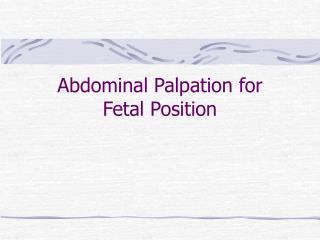
Time difference positioning (hyperbolas) 18 16 20 14 12 10 8 6 4 2 2 A B 1 4 6 8 10 A-B=10 A-B=6
2 pairs of transmitters gives 2 hyperbolas of possible positions, intersection is sought location
GPS: Global Positionining System (see notes for various web sites) • Distance to satellites is measured via traveltime. If accurate time synchronization, position is intersection of 3 spheres. • The receiver calculates the position for each satellite from the received orbit data, and then calculates its distance (pseudorange) from each satellite based on the time delay between when the transmission was sent and when it was received.(This assumes accurate time is known) • Once the distances from the satellites are known, the reciever’s position is determined by determining the intersection point of four imaginary spheres, centered at the satellites, with the radius of each sphere equal to the pseudorange of the satellite. Three spheres would be enough if time was known, i.e. with 3 unknowns x,y,z (Trilateration). With 4 unknowns at receiver (x,y,z,t) need 4 distances and equations (“spheres”)
GPS: Global Positionining System Satellite navigation system owned by US government as a national resource, run by the U.S. Department of Defense. The satellites provide coded signals that can be processed by a GPS receiver to compute position, velocity and time The system consists of a • Space Segment • Control Segment • User Segment
Space segment Satellites orbit the earth in 12 hours. 5-8 satellites are visible to the user from any point on earth (4 satellites are needed to compute location). Currently more than 30 satellites for redundancy and to increase performance.
Control segment • Monitor stations at the master control facility (Schriever Air Force Base, Colorado) incorporate satellite signals into orbital models. • The models compute orbital data and clock corrections for the satellites and upload them back to the satellites. • The satellites send time-coded subsets of the orbital data to the GPS receivers via radio signals.
Accuracy of GPS: • Standard positioning service (SPS) was the original signal, used only by military • Signal made intentionally degraded by selective availability (SA) for civilian use, accuracy about 100m • Since May 2000, SA is turned off, since then accuracy 20m • DoD now required by law to maintain SPS on a continuous world-wide basis • Since 2005 addition of second civilian signal (L2C) for enhanced performancecan correct ionospheric error, since 2 frequencies are refracted differently (only very high-end receivers) • Military still has Precise positioning service (PPS), coded with P-code,accuracy of several meters • Differential GPS: measure errors and coding effect at a fixed reference stationand correct actual position. In simplest case, assume nearby position errorsare the same and correct (subtract) wander/scatter. One commercial system is WAAS (Wide area augmentation system), gives 2-3m accuracy • For even better accuracy record exact waveform of all signals (phases etc) and post-process with reference signal:accuracy: decimeters to centimeter, in best case sub-centimeter
Why are differential GPS data more accurate than handheld GPS data? • • GPS satellites send out two different signals: L1 and L2. Differential GPS receivers measure both L1 and L2, whereas handheld GPS receivers measure only L1. • • Differential GPS uses antennas specially constructed to reduce multipath error. D.Chadwell uses 1 dual-frequency receiver on ship and 3 reference ones on land. Data are post-processes with free (but complicated) NASA software (GIPSY/OASIS from JPL). Dual-frequency GPS costs $10,000-20,000. Commercial products: They can provide sub-meter to decimeter absolute positioning with a few second latency – takes GPS and a communication link to the processing center to receive the corrections. These use a commercial version of the JPL software http://www.cnavgnss.com/about http://www.gdgps.net/
Additional features/options • data are output on serial line (RS232) in NMEA format • some receivers deliver time pulse on BNC output • systems with antenna ARRAY can also deliver orientation and inclination (attitude), e.g. ASHTEC ADU (important since better than gyrocompass, e.g. for ship ADCP) NMEA sentences that can be output by GPS receivers
GALILEO Positioning System www.esa.int/esaNA/galileo.html • 30 spacecraft • ORBITAL ALTITUDE: 23222 km • 3 orbital planes, 56° inclination (9 operational satellites and one active spare per orbital plane) • SATELLITE LIFETIME: • >12 years Currently only 4 satellites in orbit: http://www.gsc-europa.eu/system-status/Constellation-Information
Galileo Services • Open Service (OS):The OS signals will be broadcast in two bands, at 1164–1214 MHz and at 1563–1591 MHz. Receivers will achieve an accuracy of <4 m horizontally and <8 m vertically if they use both OS bands. Receivers that use only a single band will still achieve <15 m horizontally and <35 m vertically. • Commercial Service (CS).Accuracy >~ 1 m. The CS can also be complemented by ground stations to bring the accuracy down to less than 10 cm. This signal will be broadcast in three frequency bands, the two used for the OS signals, as well as at 1260–1300 MHz. • Safety of Life (SoL) & Public Regulated Service (PRS). Accuracy comparable to the Open Service. Their main aim is robustness against jamming and the reliable detection of problems within 10 seconds. They will be targeted at security authorities (police, military, etc.) and safety-critical transport applications (air-traffic control, automated aircraft landing, etc.), respectively. • Search & Rescue (SAR). Detect and report signals from COSPAS-SARSAT search-and-rescue beacons in the 406.0–406.1 MHz band, which makes them a part of the Global Maritime Distress Safety System. http://ec.europa.eu/transport/galileo/index_en.htm
Galileo Services Open Service (OS) – Interoperable with other GNSS – Provided on 3 frequencies – Free of charge – World-wide coverage – Provides position and timing performances competitive with other GNSS systems – Service for the mass market: Possible applications: in-car navigation, hybridization with mobiles… Commercial Service (CS) – Same basic performance as open service – Added value by additional information in the datastream (i.e. integrity, differential corrections) with guarantee of service – Allows for a higher data rate throughput and enables users to improve accuracy, indoor navigation, integration with wireless communication networks – Access is restricted by service provider via encryption for commercial exploitation of the service by service provider
Galileo Services Safety of Life (SoL) – Same basic performance as the open service – Additional provision of integrity information (providing timely warnings to the user when it fails to meet certain margins of accuracy) – Free of direct user charges – Unencrypted with signal authentication – Envisaged that a service guarantee will be provided for this service – Service for maritime, aviation, rail… Public Regulated Service (PRS) – Guaranteeing the continuity of public applications for European and/or national security (interference mitigation techniques: high continuity of service, more robust signal) – Controlled by EU and Member State governments – Wideband signal – Encrypted ranging codes and navigation massage – Access restricted to users authorized by EU Member State
Galileo Services Search & Rescue (SAR) – Global broadcast of alert messages received from distress emitting beacons (reception and localization) – Enhances the performances of international Search and Rescue systems such as COSPAS-SARSAT (average waiting time is currently one hour): • 5 GEOs: real-time reception • 4 LEOs: reception and position (with Doppler effect)
GLONASS (Russian ГЛОНАСС; ГЛОбальная НАвигационная Спутниковая Система; Global'naya Navigatsionnaya Sputnikovaya Sistema. Global Navigation Satellite System) • 24 spacecrafts • ORBITAL ALTITUDE: 19100 km • 3 orbital planes, 64.8° inclination (7 operational satellites and one active spare per orbital plane). Location within the plane: 1-8, 9-16, 17-24. “Spares” separation 120°, satellites equally spaced within the same orbital plane, 45° apart. • ORBIT: Roughly circular, approximately 11 hours, 15 minutes. The spacing of the satellites in orbits is arranged so that a minimum of 5 satellites are in view at any given time. The satellite orbits repeat after 8 days. As each orbit plane contains 8 satellites, there is a non-identical repeat (i.e., another satellite will occupy the same place in the sky) after one sidereal day. • SIGNALS: Standard Precision (SP) and high precision (HP). SP signal transmits 2 frequencies L1OF and L2OF. SP signal delivers • HORIZONTAL POSITIONING ACCURACY : ~5-10 meters • VERTICAL POSITIONING ACCURACY : ~15 meters • VELOCITY VECTOR MEASURING: ~10 cm/s • TIMING : ~200 ns • Since 2013 full deplyment of 24 satellites www.glonass-ianc.rsa.ru
Combined GPS+GLONASS receivers now available, even better accuracy (about 3m): https://buy.garmin.com/en-US/US/oem/sensors-and-boards/glo-/prod109827.html http://www.furuno.com/en/business_product/gps/technical/tec_multi.html Also most smartphones:
Acoustic navigation • Terms: • Transducer • Beacon/pinger • Transponder • Responder (x,y) h2 h1 (x2,y2) (x1,y1) s2 s1 (x-x1)2 + (y-y1)2 = h12(x-x2)2 + (y-y2)2 = h22 d1 d2 Long baseline navigation Measure slant ranges s1, s2 acoustically, know depths d1, d2 independently, then do only horizontal position problem for h1, h2 (2 intersecting circles). With 3 transponders, can measure 3 slant ranges and do 3-D problem, i.e. solve for x,y,z from 3 intersecting spheres.
Typical accuracy 1m (i.e. approx. 1 ms) • Have to use harmonic mean sound speed to convert traveltime to distance Determining transponder position: Perform acoustic survey to collect many slant ranges si and corresponding GPS positions xi, yi. Each position during the survey lies on a sphere around transponder atX,Y,Z, i.e. many equations (X-xi)2 + (Y-yi)2 + (Z-0)2 = si2 With 3 unknowns (do this for each transponder). Errors to correct: offset between GPS antenna and transducer, direction-dependent. Also movement of ship during traveltime needs to be corrected.
Precision transponders allow timing with microsecond accuracy. Originally developed at SIO (see MPL report by Spiess et al), mainly by adding a fixed-time delay circuit (always know to within some microseconds how much time signals spends in transponder). Measures round-trip traveltime to +/-5microseconds. Now also commercially available from Linkquest: http://www.link-quest.com/html/intro3.htm Additional uncertainty comes from uncertain ray path and multi-paths, a lot of averaging helps here, and also being in the center of the transponder array (less sensitive to depth/height errors then).
Geodetic measurements (GPS, acoustic, pressure)from ships and moorings