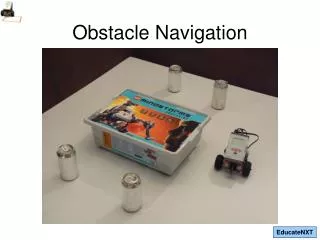
Obstacle Detection
Obstacle Detection. Introductory Presentation. Opening Activity. If you were blindfolded, what senses would you use to find things in the room?. Opening Activity. You would probably use your hands to feel around to find things by touch.

Obstacle Detection
E N D
Presentation Transcript
Obstacle Detection Introductory Presentation
Opening Activity If you were blindfolded, what senses would you use to find things in the room?
Opening Activity You would probably use your hands to feel around to find things by touch Your robot can detect objects with “touch” by using its Touch Sensor
Opening Activity If you were a bat, you would not have to run into things, or touch them, to find them (sound) (sound) The signal returns to the bat, telling it the distance to the object. A bat sends sound signals out The sound signals bounce off objects in the surrounding area
Opening Activity Your robot can also use sonar to send ultrasonic sound waves out and detect objects This sensor is called the Ultrasonic Sensor
Discussion Questions Why does the Ultrasonic Sensor have two openings in the front ? One opening is for sending out the sound waves One opening is for receiving the returning sound waves
Discussion Questions What is the difference between the Ultrasonic Sensor and the Touch Sensor ? The Ultrasonic Sensor does not have to touch an object to detect it The Touch Sensor must touch an object in order to detect it
Review In previous activities we told the robot to “wait” for different conditions. Wait for the robot to “hear” a sound Wait for the Rotation Sensor to read 720 degrees
Preview Then we will wait for the Ultrasonic Sensorto come near an object Now we will tell the robot to wait for the Touch Sensor to be pressed
Preview Don’t forget that the Ultrasonic Sensor can read both inches and centimeters, so check which one you have selected.
Preview As you complete the activity, think about when you would want to use the Ultrasonic Sensor or the Touch Sensor.
Good Luck! Now you have the necessary knowledge to get started in the Obstacle Detection Activity.