Download

1 / 65
660 likes | 821 Vues
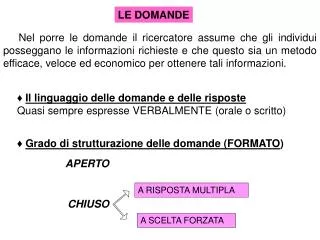
Risposta dinamica degli strumenti (PRONTEZZA) Esprime la capacità di uno strumento a seguire e misurare una grandezza variabile nel tempo. comportamento ideale. esempio di comportamento reale. x(t). 1,5. x(t),y(t)/k. y(t)/k. 1. 0,5. 0. 0. 1. 2. 3. -0,5. -1. -1,5. tempo.

E N D
Risposta dinamica degli strumenti (PRONTEZZA) Esprime la capacità di uno strumento a seguire e misurare una grandezza variabile nel tempo. comportamento ideale
esempio di comportamento reale x(t) 1,5 x(t),y(t)/k y(t)/k 1 0,5 0 0 1 2 3 -0,5 -1 -1,5 tempo
COMPORTAMENTO DINAMICO DEGLI STRUMENTI • idealmente: y(t) = k x(t) • in realtà: lo strumento insegue le variazioni del misurando, riproducendole con un certo grado di approssimazione, che dipende dalle sue caratteristiche dinamiche
Si suppone lo strumento LINEARE, dunque è possibile applicare il principio di sovrapposizione degli effetti. In questa situazione non è necessaria la taratura per tutti i segnali possibili: ognuno può essere scomposto in somma o integrale di segnali semplici. Data l’ipotesi di linearità, la risposta al segnale complesso è la somma delle risposte ai segnali semplici in cui quello complesso è scomponibile.
s = segnale r = risposta s r ssemplice rsemplice
Segnali semplici più comuni: • sinusoide • gradino • impulso • rampa t t t t
ANALITICA: è nota l’equazione dello strumento (si tratta comunque di un modello, di una semplificazione, non è una descrizione completa dello strumento) SPERIMENTALE: non è nota l’equazione dello strumento o è troppo complessa; è comunque la via più sicura per eseguire una TARATURA DINAMICA Studio del comportamento dinamico degli strumenti: due possibilità
Studio analitico: presuppone la creazione di un modello Se lo strumento è lineare l’equazione che lo descrive è un’equazione differenziale a coefficienti costanti: (1) Ove: qo = output qi = input t = tempo a,b = coefficienti costanti
(2) Definendo per semplicità si ha: La soluzione di questa equazione è stata studiata in modo sistematico con diversi metodi (ad es. la trasformata di Laplace). Secondo l’approccio classico la soluzione è del tipo: qo=qog+qop qog = integrale generale dell’omogenea associata qop = integrale particolare dell’equazione completa
qog ha n costanti iniziali che si ricavano imponendo altrettante condizioni iniziali. E’ la soluzione della: Ove l’operatore D è trattato come un’incognita algebrica. Il metodo per trovare qog è universale. qop è l’integrale particolare. Il metodo per ricavarlo non è universale, dipende da qi. Si possono cercare dei valori di qi tali per cui sia facile trovare q0p. Assegnato qi l’espressione a destra dell’uguale in (1) è una f(t).
Si può derivare ripetutamente questa funzione. Se le derivate non crescono in valore oltre un certo ordine si può scrivere: Ove A, B, C si ricavano imponendo che la (1) sia un’identità (non contano le condizioni iniziali).
FUNZIONE DI TRASFERIMENTO (TF) OUT IN TF La TF che lega qo a qi è definita trattando l’equazione (2) come se fosse una relazione algebrica e facendo il rapporto Sottolinea che è una relazione generale e non riguarda solo un dato istante
FUNZIONE DI TRASFERIMENTO (TF) OUT IN qi qo Questo è un discorso di validità generale. Vale solo se l’impedenza di ingresso del blocco a valle è >> dell’impedenza di uscita di ciò che sta a monte 10
La funzione di trasferimento può assumere espressioni diverse a seconda delle tecniche di analisi impiegate per ottenerla e valutarla. Le due vie più percorse sono quelle della TRASFORMATA DI LAPLACE più utilizzata in ambito elettronico TRASFORMATA DI FOURIER più utilizzata in ambito meccanico, che vede, sotto ipotesi abbastanza larghe, ogni segnale come somma di sinusoidi. Se vale quanto già detto sulla linearità del sistema considerato, ci si può concentrare sulla risposta alla singola sinusoide
FUNZIONE DI TRASFERIMENTO SINUSOIDALE La funzione di ingresso (input) è del tipo: qi=Ai sint se si aspetta un tempo sufficiente (gli effetti del transitorio svaniscono), anche qo è un’onda sinusoidale. Cambia però l’ampiezza e ci può essere ritardo. La risposta del sistema è proprio individuata da queste due quantità. Si può agire a) cercando la soluzione particolare dell’equazione dello strumento ponendo: f
b) sfruttando la funzione di trasferimento in frequenza: Per ogni pulsazione è un numero complesso del tipo tale che: Con Ao=ampiezza output Ai=ampiezza input è la fase tra i due segnali 12
Im Aoe(it)+ Im Asin Aieit t Re Acos Re funzione di trasferimento in frequenza (armonica): L’obiettivo ideale sarebbe, dato un certo ingresso sinusoidale, avere un’uscita pure sinusoidale con un fattore di amplificazione costante al variare della frequenza e con sfasamento nullo (si vedrà poi che sulla fase è possibile adottare regole meno restrittive) qi qo
BANDA PASSANTE si definisce banda passante di uno strumento di misura il campo di frequenze (f1 , f2) entro cui il segnale non risulta distorto: • ilmodulo della risposta in frequenza si mantiene • costante entro una specificata tolleranza; • la fase é nulla entro una specificata tolleranza.
Ao Ai Criterio di progetto: la banda di interesse del fenomeno misurando deve essere interamente contenuta nella banda passante dello strumento: f f f f 1 min max 2 CASO IDEALE j f f
n=0 n= n=n 1 OSSERVAZIONI E’ emerso come uno strumento si possa dire pronto quando non distorce il segnale di ingresso. Un segnale non viene distorto quando tutte le armoniche in esso presenti vengono moltiplicate per un fattore (modulo della funzione di trasferimento) costante e lo sfasamento delle armoniche in uscita, rispetto a quelle del segnale di ingresso, è pari a: - 0° - 180° - proporzionale all’ordine dell’armonica ossia:
Mentre sono ovvie le considerazioni sul modulo e le prime due sulla fase, la terza merita qualche spiegazione: n=n 1 =cost Si ha che 1/2=t1/T T periodo della 1a armonica Dunque n=n 1 = n t12/T= n t1cost, con 1 = sfasamento della prima armonica (fondamentale) Allora, se qo è composto da più armoniche: fase iniziale dell’armonica n = fondamentale n=n armonica di ordine n
Si dimostra che sfasamento proporzionale all’ordine dell’armonica equivale ad un ritardo costante nel tempo T=periodo prima armonica Periodo n volte più piccolo
2 1 0 -1 -2 0 0.2 0.4 0.6 0.8 1 [s] In definitiva: sfasamento proporzionale all’ordine dell’armonica significa traslare l’asse dei tempi di t1 secondi; non si ha distorsione ma solo ritardo t seconda armonica t prima armonica = Fai vedere il segnale somma
RISPOSTA AD UN SEGNALE PERIODICO Funzione periodica: f(t+T)=f(t) T=periodo Se sono rispettate le condizioni di Dirichlet, ossia se la funzione è ad un sol valore, è finita ed ha un numero finito di discontinuità e di massimi e minimi in un ciclo, può essere rappresentata con la serie di Fourier: W=fondamentale E’ una serie con infiniti termini, tutti occorrenti per una ricostruzione perfetta del segnale di partenza. Per fortuna in campo ingegneristico non è richiesta una riproduzione perfetta.
Spesso meno di 10 armoniche sono sufficienti. Di conseguenza è necessario ce lo strumento si mostri pronto solo per queste armoniche. w w w
Risposta ad un segnale periodico Passando al dominio delle frequenze: wk=kw1 Il prodotto tra Qi(iw k) e dà Qo(iw k)
Se si ripete per tutte le frequenze e si sommano i Qo(iw k) si ha lo spettro del segnale di uscita Qo(iw ) Se lo strumento è pronto, qi(t) e qo(t) hanno all’incirca la stessa forma. Il fatto che i segnali reali siano di questo tipo giustifica i discorsi sin qui fatti: se qi fosse composto da una sola armonica basterebbe correggere le distorsioni su quell’armonica senza necessità di uno strumento pronto.
RISPOSTA AD UN TRANSITORIO Transitorio: qi(t)=0 identicamente per tutti i valori di tempo maggiori di un valore finito t0. Se qi è uno dei segnali semplici visti, si può procedere secondo i metodi classici validi per quei segnali semplici. Se qi è qualsiasi, occorre un procedimento più generale, la trasformata di Fourier. Spettro Con w che assume tutti i valori da - a +
qi periodica spettro discreto qi transitorio spettro continuo ESEMPIO Questi argomento saranno ripresi in maggiore dettaglio nel seguito
Strumento di ordine 0 Se in (1) tutti gli ai e i bi esclusi a0 e b0 sono nulli, si degenera in una equazione algebrica aoqo=boqi Poiché l’equazione è algebrica è chiaro che, indipendentemente da come varia qi, qo lo seguirà perfettamente senza distorsione o ritardo di fase. E’ lo strumento con la risposta ideale. Esempio: potenziometro che misura la posizione
Esempio: potenziometro che misura la posizione In realtà questo è un caso ideale. Per misurare, nell’esempio visto, si inserisce un voltmetro che fa circolare corrente. Se ci fosse una resistenza pura tutto andrebbe bene, ma se appena il cursore si muove un po’ più in fretta, ci sono effetti capacitivi ed induttivi che danno errori (viene modificato il rapporto xi e0). Inoltre il cursore avrà sempre una massa, dunque un’inerzia, che impedisce l’impiego di un modello di strumento di ordine zero. Tutte le volte che ci sono inerzie (cioè nella maggioranza dei casi) questo modello viene messo in crisi.
Strumento del PRIMO ORDINE Ci sono tre parametri fondamentali, ossia a1, a0, b0, ma solo 2 sono essenziali. Il problema della determinazione del comportamento dello strumento si riduce ad una identificazione di parametri, ossia k e t k = sensibilità statica: è l’output per unità di inpu in condizioni statiche (derivate tutte nulle) = costante di tempo
q(t) A s(t) Q
Esempio: termometro a liquido (t)= temperatura del fluido termometrico (funzione del tempo) s(t) = temperatura del liquido (funzione del tempo, uniforme in tutto l’ambiente di misura) k = coefficiente di trasmissione del calore fra liquido e fluido termometrico (non ha niente a che vedere con la sensibilità statica appena definita) Si trascurano le variazioni di energia cinetica della massa di liquido in moto nel capillare, quelle di energia potenziale, gli effetti della capillarità, della viscosità.. Q = calore scambiato tra liquido e fluido A=superficie interessata allo scambio di calore
Calore entrante nel termometro c = calore specifico m = massa di liquido nel termometro dQ =mcds il calore entrante nel termometro ne innalza la temperatura Se si pone s = qo e = qi si ritrova la forma generale già scritta
Il fatto che il termometro sia considerato uno strumento del primo ordine è subordinato al modello scelto, che a sua volta è fissato sulla base dell’utilità del modello stesso. In dipendenza da particolari esigenze è possibile pensare al termometro come ad uno strumento del secondo ordine (vedi Doeblin)
Purché sia: La funzione di trasferimento è la seguente: Lo studio di tale funzione nei vari casi di segnale semplice verrà illustrato nel seguito.
Strumenti del secondo ordine: Equazione Parametri fondamentali: Sensibilità statica Pulsazione propria Frequenza propria Parametro adimensionale di smorzamento
Dall’equazione: Si arriva a:
2° ordine ESEMPI: Bilancia M Ks B (MD2+BD+Ks)xo=fi
Strumenti del secondo ordine: Galvanometro 23
INDICE SU SCALA GRADUATA MOLLE TORSIONALI ANTAGONISTE N S BOBINA MOBILE
PRINCIPIO DI FUNZIONAMENTO: BOBINA PERCORSA DA I FORZA SU FILO F = B L I F I B F S N I S N I F
F I S BOBINA PERCORSA DA I FORZA SU FILO F = B L I COPPIA SU FILO T1’ = F D/2 = B L D I / 2 COPPIA SU SPIRA T1 = 2 T1’ = B L D I COPPIA SU N SPIRE TN = N B L D I COPPIA RESISTENTE TM = k N
CASO STATICO EQUILIBRIO MECCANICO TN = TM da cui = ( N B L D / k ) I = k’ I POSIZIONE INDICE I Strumento lineare SENSIBILITA’ k’ = N B L D / k OBIETTIVO: sensibilita’ k’ ALTA per misurare I basse
.. . J+r+k=TN=k’i(t) SENSIBILITA’ k’ - k MOLLA CEDEVOLE - N, L, D BOBINA GRANDE RISPOSTA DINAMICA: SISTEMA DEL II° ORDINE (c’è l’inerzia della spira e vi sono forze smorzanti anche per stabilizzare l’indice su una determinata posizione della scala riducendo i transitori). L’equilibrio meccanico alla rotazione si scrive allora come J = momento di inerzia dell’equipaggio mobile del galvanometro attorno al suo asse di rotazione
.. . J+r+k=TN=k’i(t) r = smorzamento del sistema assunto di tipo viscoso (in tale termine si può far rientrare la f.c.e.m.: dalla legge di Lenz e=-dj/dt k = costante elastica della molla di richiamo q = rotazione dell’equipaggio mobile del galvanometro (qo) i(t) = corrente che percorre le spire della bobina
k N J PULSAZIONE NATURALE ALTA’ SENSIBILITA’ J e k N Si ha che sensibilita’ e frequenza propria si muovano in direzioni opposte (tipico in sistemi del II ordine). Si vedrà tra poco come, in genere, una pulsazione propria bassa sia poco desiderabile ai fini di una buona risposta in frequenza tante spire k’ elevato