Module 10 Energy
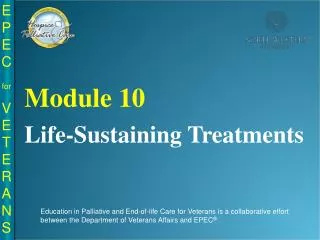
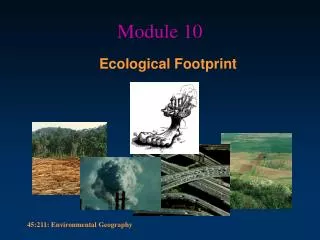
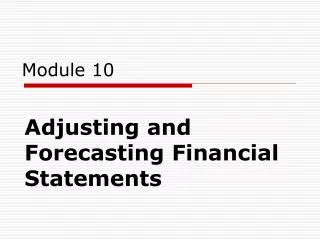
y’. y’. S’. S’. v. v. u’ 1. u’ 2. M’ = M o. m’ 1. m’ 2. w’ = 0. x’. x’. (a). (b). Fig. 10-1. Module 10 Energy. Mass and Energy Equivalence.

Module 10 Energy
E N D
Presentation Transcript
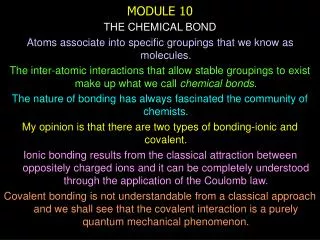
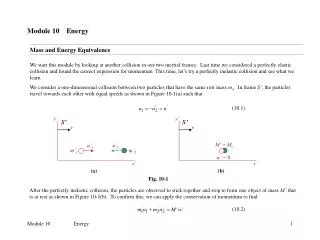
y’ y’ S’ S’ v v u’1 u’2 M’ = Mo m’1 m’2 w’ = 0 x’ x’ (a) (b) Fig. 10-1 Module 10 Energy Mass and Energy Equivalence We start this module by looking at another collision in our two inertial frames. Last time we considered a perfectly elastic collision and found the correct expression for momentum This time, let’s try a perfectly inelastic collision and see what we learn. We consider a one-dimensional collision between two particles that have the same rest mass mo. In frame S’, the particles travel towards each other with equal speeds as shown in Figure 10-1(a) such that (10.1) After the perfectly inelastic collision, the particles are observed to stick together and stop to form one object of mass M’ that is at rest as shown in Figure 10-1(b). To confirm this, we can apply the conservation of momentum to find (10.2) Energy
y S y S m2 = mo u1 M w = v = u’ m1 u2 = 0 x x (a) (b) Fig. 10-2 Since the two particles initially move at the same speed, their relativistic masses are the same, ie. m’1 = m’2 = m’. Combining this fact with Eq. (10.1) gives or w’ = 0. The one combined object is indeed at rest. Thus, the mass M’ in Eq. (10.2) is the rest mass of the combined object, Mo. We now consider the collision from the perspective of frame S in which frame S’ is moving to the right at a velocity of (10.3) If you consider this choice for a while, you should see that this makes the collision viewed in frame S look like the one shown in Figure 10-2. Specifically, Particle 2 is at rest before the collision and the combined particles travel to the right at velocity w = v = u’ after the collision. Energy
Applying conservation of momentum in S gives (10.4) Both of the masses in Eq. (10.4) are relativistic masses since both particles are moving. We express them in terms of their rest masses using the relation we developed in the last module [Eq. (9.24)] so that Eq. (10.4) becomes (10.5) We now make use of the x-component velocity transform [Eq. (5.3)] to write (10.6) Remember that u’1 = u’ = v [Eqs. (10.1) and (10.3)] so that Eq. (10.6) is equivalent to (10.7) We substitute Eq. (10.7) into the left side of Eq. (10.5) and then flip the equation to yield (10.8) Energy
S ui = 0 uf = u F xi xf x Fig. 10-3 Bringing the 1 + u’2/c2 under the radical sign gives or, put more simply, (10.9) This is an interesting result! The rest mass of the object formed by the combined particles is not equal to the sum of the two particle’s individual rest masses! In fact, it is larger by an amount equal to (10.10) So where does this extra rest mass come from? The title of this section alludes to the answer. Let’s look closer at the kinetic energy of a particle. To do this, let’s find the work done by a net force F in accelerating a particle of rest mass mo in one dimension from rest to some final speed u. Figure 10-3 shows the situation. Energy
From the chain rule, so that Eq. (10.13) becomes and This amount of work is equal to, by definition, (10.11) By Newton’s Second Law, the net force is equal to the particle’s change in momentum so the work is equal to (10.11) Since the momentum is equal to mu, this becomes (10.12) Remember that m is the relativistic mass which changes with speed. It will be changing with time along with the speed. Thus, we must use the product rule in evaluating the momentum derivative to write (10.13) (10.14) Energy
We can replace dx/dt with the speed u so that we arrive at (10.15) Notice that we now have two terms to integrate, each with respect to different variables. We really should change our limits of integration. The first term is integrated with respect to speed and should be evaluated from ui = 0 to uf = u. The second term is integrated with respect to mass and should be evaluated from mi = mo to mf = m. Instead of doing these two separate integrations, let’s relate speed to mass and see if we can get away with only doing one integration. The relativistic mass is given by (10.16) Differentiating mass with respect to speed gives (10.17) Note that the first term in Eq. (10.17) is the relativistic mass m so that we can write or (10.18) Energy
Substituting Eq. (10.18) into our integral in Eq. (10.15) gives only one simple integration with respect to mass (10.19) Integrating gives (10.20) Recall that we said that we want to look at kinetic energy. How is kinetic energy related to work? You should remember that the answer is through the work-energy theorem. The net work done in moving an object is equal to the change in the kinetic energy of the object, (10.21) In our case, W is the net work and the initial kinetic energy of the particle is zero. Thus, the kinetic energy K of the object traveling at speed u is given by (10.22) Okay, let’s take this result and use it in our perfectly inelastic collision. Let’s evaluate how much kinetic energy is lost in the collision with respect to frame S’. Before the collision, the total kinetic energy is (10.23) Energy
Remember that both particles travel at the same speed in S’ so the relativistic masses are equal, m’1 = m’2 = m’. Thus, (10.24) The relativistic mass is given by (10.25) so the total initial kinetic energy is (10.26) After the collision, the combined particles are at rest [Figure 10-1(b)] so the final kinetic energy is zero. Thus, the energy lost in the collision is (10.27) Here comes the big finish! Recall that the combined object’s rest mass is larger that the individual rest masses by the amount in Eq. (10.10). If you multiply the rest mass gained by c2, you get the exact amount of kinetic energy lost in Eq. (10.27). Thus, we conclude that energy was converted to mass in this collision! There is an equivalence to mass and energy that can be expressed as (10.28) Energy can be converted into matter and matter can be converted into energy in an entirely new way according to Einstein’s relativity theory. Energy
y y’ S S’ Rest Energy Kinetic Energy Total Energy u x O O’ Fig. 10-4 Rest Energy, Kinetic Energy, and Total Energy Here is what we can now say about the energy of a single object moving at some some speed u. Again, it is useful to imagine the particle at the origin of frame S’ with frame S’ moving relative to the observer in frame S at speed u as shown in Figure 10-4. The kinetic energy of the object is given in Eq. (10.22) as Rearranging terms gives (10.29) The first term on the left side of this equation is the kinetic energy K. The second term depends only on the rest mass, not the speed. We call this the rest energy of the object. These two energies are added to give the total energy, E = mc2. The concept of rest energy comes entirely from Einstein’s theory of relativity. Since energy and mass are equivalent, an object made out of matter has an energy even if it is at rest. As we did in the last module, we use the gamma factor between the observer and the object to write the relativistic mass as (10.31) so that the various energy terms can be written as shown below. (10.32) (10.33) (10.34) Energy
Momentum-energy Four-vector Now that we have established the correct expressions for momentum and energy, we can now find the correct transformation equations for these quantities so that the momentum and energy of an object measured in frame S can be related to the momentum and energy measured by another observer in inertial frame S’. In fact, you are going to do this in one of your homework problems. You will define another four-vector, called the momentum-energy four-vector. The vector will have the following components in S and S’, respectively. (10.35) You will show that the length of the vector is invariant, just like the space-time and proper velocity four-vectors. Thus, it also is transformed from one frame to the other with the same Lorentz transformation matrix L that we saw in Eq. (3.20). (10.36) Multiplication of the matrices gives the transformation equations for momentum and energy as (10.37) As usual, swapping primed and unprimed variables and replacing v with –v give the inverse transformation equations. Energy