Enhancing Spatial Awareness in Low-Cost Robotics for Education and Beyond
10 likes | 137 Vues
This project explores innovative approaches to create affordable robotic platforms equipped with enhanced spatial awareness capabilities. By utilizing the iRobot Create and off-board wireless control, we aim to develop a user-friendly system for educational settings, making robotics accessible for young learners. Our prototypes incorporate advanced sensing techniques, including IR and monocular vision, enabling applications ranging from delivery and surveillance to interactive learning. This research not only supports basic robotic operations but also fosters an understanding of autonomy and spatial reasoning, all for a remarkably low cost.

Enhancing Spatial Awareness in Low-Cost Robotics for Education and Beyond
E N D
Presentation Transcript
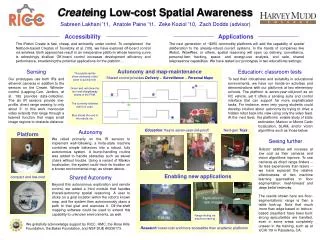
Createing Low-cost Spatial Awareness Sabreen Lakhani '11, Anatole Paine '11, Zeke Koziol '10, Zach Dodds (advisor) Education: they're seven-year-old-proof! Next-gen Toys Accessibility Applications The iRobot Create is fast, cheap, and eminently under control. To complement the Netbook-based Creates of Touretzky et al. ('09), we have explored off-board control via wireless. Both approaches result in an inexpensive platform whose learning curve is refreshingly shallow. Off-board control increases development efficiency and performance, broadening the potential applications for the platform… . The next generation of ~$250 commodity platforms will add the capability of spatial deliberation to the already-robust current systems. In the hands of companies like iRobot, WowWee, or others, spatial reasoning will open up delivery, surveillance, personal-item tracking, space- and energy-use analysis, and safe, shared telepresence capabilities. We have tested our prototypes in two educational settings: Autonomy and map-maintenance Sensing Education: classroom tests The purple sprites show odometry: robot pose is quickly lost. Shared control provides Delivery ~ Surveillance ~ Personal Maps Our prototypes use both IRs and ethernet cameras in addition to the sensors on the Create. Wiimote-control (Lapping-Carr, Jenkins, et al. '08) provides data-collection. The six IR sensors provide low-profile, direct range sensing to only about 3'. In this work monocular video extends that range through a learned function that maps small image regions to obstacle distance. To test their robustness and suitability in educational environments, we have run hands-on activities and demonstrations with our platforms at two elementary schools. The platform is seven-year-old-proof as an RC vehicle, yet it offers a sensing suite and control interface that can support far more sophisticated tasks. For instance, even very young students could develop intuition about autonomy by trying to drive a hidden robot back into view using only the video feed. At the next level, the platforms enable study of state Green and red show the turn and straightaway states of the FSM. The currently-followed wall is in cyan. Blue shows the end of the robot's run. estimation, Markov or Monte Carlo localization, SLAM, and/or vision algorithms such as those below. Autonomy Platform We relied primarily on the IR sensors to implement wall-following: a finite-state machine combines simple behaviors into a robust, fully autonomous system. A bump-handling routine was added to handle obstacles such as swivel chairs without trouble. Using a variant of Markov localization, the system could track its location on a known environmental map, as shown above. Seeing further Robots' abilities will increase at low cost as their cameras and vision algorithms improve. To use cameras as direct range finders -- far less expensively than lasers -- we have explored the relative effectiveness of two machine learning approaches to floor segmentation: feed-forward and deep belief networks. The results shown here are floor-segmentations: range is then a table look-up. Note that much more than edge-based or texture-based classifiers have been built: strong specularities are handled, even in some areas completely unseen in the training, such as at IJCAI '09 in Pasadena, CA. IRs Enabling new applications Shared Autonomy compact and low-cost control Beyond this autonomous exploration and remote control, we added a third module that handles shared-autonomy spatial reasoning. A user to clicks on a goal location within the robot's known map, and the system then autonomously plans a path to that goal and executes it. Off-the-shelf mapping software could be used to extend this capability to unknown environments, as well. Application to new images power Range-finding via machine learning Training We gratefully acknowledge support by RICC, HMC, the Rose Hills Foundation, the Baker Foundation, and NSF DUE #0536173. Research: lower-cost and more accessible than academic platforms