Vibration and isolation
Vibration and isolation. Seismic isolation. Use very low spring constant (soft) springs Tripod arrangement used for mounting early AFM’s Had long period (rigid body) vibration but isolated above resonance Large supported mass also lowers resonance

Vibration and isolation
E N D
Presentation Transcript
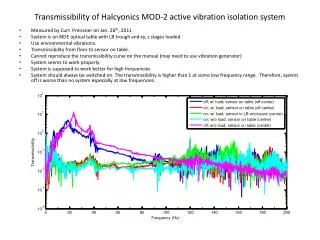
Seismic isolation • Use very low spring constant (soft) springs • Tripod arrangement used for mounting early AFM’s • Had long period (rigid body) vibration but isolated above resonance • Large supported mass also lowers resonance • Measure with accelerometers, one for each direction
Optical table legs • Same basic idea – low spring constant support • Table will tilt as a whole but not transmit floor (seismic) vibration • Table will couple through electric wires, etc. • Equipment on table sensitive to acoustic vib. • Suspension becomes unstable if CG too high • Must use three active legs and one slave – otherwise unstable
Coupled vibration • Good and bad – electric cables bad • Coupling interferometer to mirror under test is good • Both vibrate together (in phase) so fringes still • Nice animation in references of coupled masses • Gives idea of multiple modes in solids • This is a one D model but can see effect in other D • Simulate in lab with sample of different springs and masses
Acoustic vibration • Sound (acoustic vibration) is air pressure waves • Transmitters (vibrating plates - speaker cones) are also good receivers • Decrease coupling by putting holes in plates • Making plates of damped materials (lead sheet) • Acoustic coupling often not recognized for what it is • Need a sound pressure sensor (microphone not accelerometer)
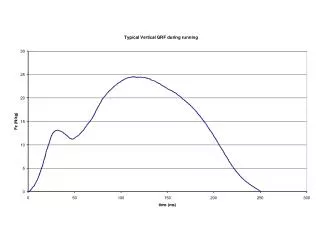
Resonances and stiffness • Cantilever wire (rod) off speaker cone • Note fundamental and higher modes • Note how sharp the resonance is, high Q • Use resonance, length and diameter to find E • Also, clamp wire as cantilever, add small weight measure deflection and calculate E • Do two methods give about the same value for E
Torsional rigidity For solid of uniform circular cross-section, the torsion relations are: T/J = GΦ/l where: Φ is the angle of twist in radians. T is the torque (N·m or ft·lbf). l is the length of the object the torque is being applied to or over. G is the shear modulus or more commonly the modulus of rigidity and is usually given in gigapascals (GPa), lbf/in2 (psi), or lbf/ft2. J is the torsion constant for the section . the product GJ is called the torsional rigidity. Applying small torque difficult so measure frequency and find G
Kinematic stackups • Problem illustrated by convex test plate • Measure frequency of vibration (rocking) • From geometry of part is this reasonable? • Would frequency be higher or lower if longer radius? • Nothing is flat so need to make flat to flat connections kinematic • One thing that helps is acoustic damping; thin air film
Measurement Schema • Measurement tools 10x more accurate (or sensitive) than tolerance implies confidence in measurement • In optics, measuring accuracy about same as tolerance – need error separation methods • Quantum optics – act of measuring changes result
Symmetry and reversal Assume f(x) over -1 to 1 To find fe(x) = 1/2[f(x) + f(-x)] fo(x) = 1/2[f(x) – f(-x)] Works for surfaces too fee = ¼[f(x,y) + f(-x,y) + f(x,-y) + f(-x,-y), etc
Centroid and remove rotationally symmetric error Relative pseudo aberration value 9.51 9.38 1.56
Pseudo astigmatism and coma .75 1.02 .71 .57