Download
1 / 10
110 likes | 499 Vues
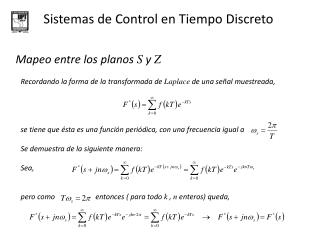
Sistemas de Control en Tiempo Discreto. En forma análoga, una ecuación de estado en tiempo discreto, es una ecuación de diferencias de primer orden vectorial. La ecuación de salida, que completa el modelo en tiempo discreto es descrita con las mismas matrices C y D del modelo en tiempo continuo.

E N D
Sistemas de Control en Tiempo Discreto En forma análoga, una ecuación de estado en tiempo discreto, es una ecuación de diferencias de primer orden vectorial. La ecuación de salida, que completa el modelo en tiempo discreto es descrita con las mismas matrices C y D del modelo en tiempo continuo. Partiendo de, Si se asume que el vector de entrada sólo cambia instantes equidistantes, entonces la representación en tiempo discreto de la ecuación de estado será: Modelo en Variables de Estado en Tiempo Discreto
Sistemas de Control en Tiempo Discreto Para la deducción de las matrices cuadrada y se parte de la solución de la ecuación de estado en tiempo continuo, donde se sabe que es la matriz de transición de estado. Como el vector de entrada se asume constante entre instantes de muestreo, se tiene que para el k-ésimo instante, la solución será: o también, Modelo en Variables de Estado en Tiempo Discreto
Sistemas de Control en Tiempo Discreto Multiplicando esta última expresión por y restándola de la anterior, resulta: Haciendo se tiene, Y haciendo da, Modelo en Variables de Estado en Tiempo Discreto
Sistemas de Control en Tiempo Discreto Comparando este resultado con la solución en tiempo continuo, se tiene finalmente que: Si en particular existe la inversa entonces se puede alternativamente calcular, Modelo en Variables de Estado en Tiempo Discreto
Sistemas de Control en Tiempo Discreto En forma compacta, EJEMPLO: Hallar la representación en tiempo discreto para T=1, del sistema continuo, Modelo en Variables de Estado en Tiempo Discreto
Sistemas de Control en Tiempo Discreto SOLUCIÓN: Se recuerda que mediante Laplace, la matriz de transición de estado es, siendo la inversa de una matriz, Luego, Modelo en Variables de Estado en Tiempo Discreto
Sistemas de Control en Tiempo Discreto Por otro lado, Sustituyendo el valor del período de muestreo en las matrices, resulta finalmente: NOTA: Las dimensiones de las matrices entre las versiones, se conservan Modelo en Variables de Estado en Tiempo Discreto
Sistemas de Control en Tiempo Discreto Sea, con y Vectores y Matrices de dimensiones apropiadas. Aplicando la transformada Z se tiene: Luego, Ahora la matriz de transición de estado (en Z) es . Finalmente, Aquí: Solución de la Ecuación de Estado Discreta
Sistemas de Control en Tiempo Discreto EJEMPLO: Hallar la solución (en el tiempo) para la ecuación de estado, cuyas condiciones iniciales son y la entrada es un escalón unitario. SOLUCIÓN: La entrada a considerar es, y la matriz de transición de estado es, Solución de la Ecuación de Estado Discreta
Sistemas de Control en Tiempo Discreto Con lo que la solución homogénea es, Y la solución particular es, Finalmente, con la suma de las dos soluciones, resulta: Solución de la Ecuación de Estado Discreta