Development of Autonomous Aerial Vehicle for International Aerial Robotics Competition
Micro-CART, a team from Iowa State University, aims to design and implement a fully autonomous aerial vehicle to compete in the International Aerial Robotics Competition (IARC) held annually at Georgia Tech. This project involves outfitting the drone with advanced sensors and control systems for navigation and data transmission, allowing it to perform designated tasks autonomously. The team is focused on overcoming technical challenges and adhering to IARC guidelines, with the anticipated completion set for Spring 2003, in time for the July 2003 competition.

Development of Autonomous Aerial Vehicle for International Aerial Robotics Competition
E N D
Presentation Transcript
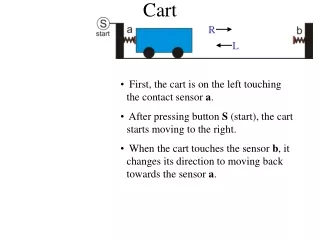
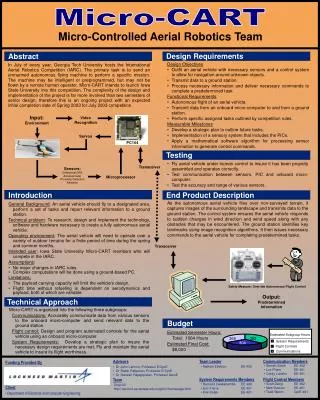
368 392 304 Micro-CART Micro-Controlled Aerial Robotics Team Design Requirements Abstract In July of every year, Georgia Tech University hosts the International Aerial Robotics Competition (IARC). The primary task is to send an unmanned autonomous flying machine to perform a specific mission. The machine may be intelligent or preprogrammed, but may not be flown by a remote human operator. Micro-CART intends to launch Iowa State University into this competition. The complexity of the design and implementation of the project is far more involved than two semesters of senior design, therefore this is an ongoing project with an expected initial completion date of Spring 2003 for July 2003 competition. • Design Objectives • Outfit an aerial vehicle with necessary sensors and a control system to allow for navigation around unknown objects. • Transmit data to a ground station. • Process necessary information and deliver necessary commands to complete a predetermined task. • Functional Requirements • Autonomous flight of an aerial vehicle. • Transmit data from an onboard micro-computer to and from a ground station. • Perform specific assigned tasks outlined by competition rules. • Measurable Milestones • Develop a strategic plan to outline future tasks. • Implementation of a sensory system that includes the PICs. • Apply a mathematical software algorithm for processing sensor information to generate control commands. Input: Environment Video Recognition Servos PC104 Testing • Fly aerial vehicle under human control to insure it has been properly assembled and operates correctly. • Test communication between sensors, PIC and onboard micro-computer. • Test the accuracy and range of various sensors. Transceiver Sensors: Differential GPS Accelerometer Proximity Detection Altimeter Microprocessor Introduction End Product Description As the autonomous aerial vehicle flies over non-surveyed terrain, it captures images of the surrounding landscape and transmits data to the ground station. The control system ensures the aerial vehicle responds to sudden changes in wind direction and wind speed along with any obstacles that may be encountered. The ground station identifies key landmarks using image recognition algorithms. It then issues necessary commands to the aerial vehicle for completing predetermined tasks. • General Background: An aerial vehicle should fly to a designated area, perform a set of tasks and report relevant information to a ground station. • Technical problem: To research, design and implement the technology, software and hardware necessary to create a fully autonomous aerial vehicle. • Operating environment: The aerial vehicle will need to operate over a variety of outdoor terrains for a finite period of time during the spring and summer months. • Intended user: Iowa State University Micro-CART members who will compete in the IARC. • Assumptions: • No major changes in IARC rules. • Complex computations will be done using a ground-based PC. • Limitations: • The payload carrying capacity will limit the vehicle’s design. • Flight time without refueling is dependent on aerodynamics and payload, both of which are variable. Transceiver Safety Measure: Override Autonomous Flight Control Output: Predetermined Information Technical Approach Micro-CART is organized into the following three subgroups: Communications: Accurately communicate data from various sensors to the onboard micro-computer and send relevant data to the ground station. Flight control: Design and program automated controls for the aerial vehicle using an onboard micro-computer. System Requirements: Develop a strategic plan to insure the necessary design requirements are met. Fly and maintain the aerial vehicle to insure its flight worthiness. Budget Estimated Semester Hours: Total: 1064 Hours Estimated Subgroup Hours System Requirements Estimated Final Cost: $8,000 Flight Controls Communications Advisors Team Leader Communication Members Funding Provided By • Steven Smith EE 492 • Loc Pham EE 491 • Corey Lubahn EE 491 • Nathan Ellefson EE 492 • Dr John Lamont, Professor E/CprE • Dr Ralph Patterson, Professor E/CprE • Dr Ganesh Rajagopalan, Professor AeroE System Requirements Members Flight Control Members Team • Bernard Lwakabamba EE 492 • Eric Frana EE 491 • Kirk Kolek EE 491 • Scott Dang EE 492 • Matt Devries EE 491 • Todd Welch CprE 491 Ongo03 http://seniord.ee.iastate.edu/ongo03/homepage.html Client • Department of Electrical and Computer Engineering