Torque
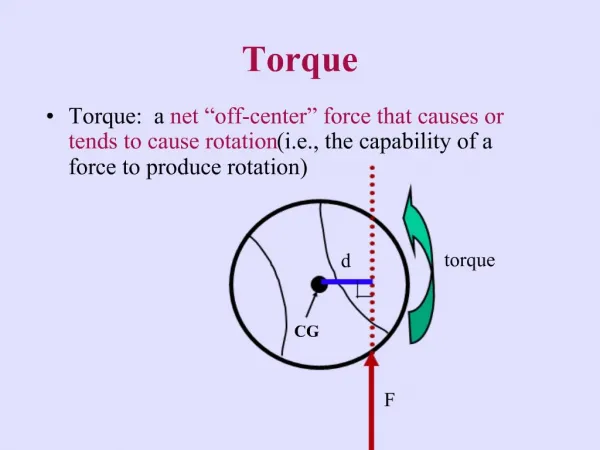
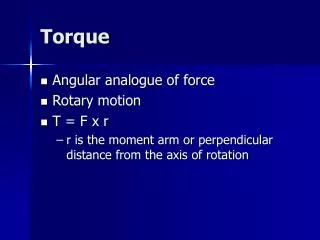
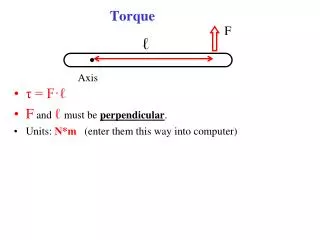
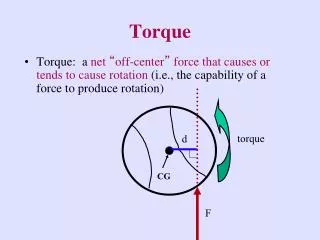
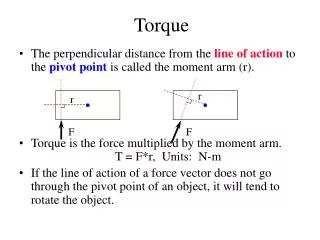
r. r. F. F. Torque. The perpendicular distance from the line of action to the pivot point is called the moment arm (r). Torque is the force multiplied by the moment arm. T = F*r, Units: N-m

Torque
E N D
Presentation Transcript
r r F F Torque • The perpendicular distance from the line of action to the pivot point is called the moment arm (r). • Torque is the force multiplied by the moment arm. T = F*r, Units: N-m • If the line of action of a force vector does not go through the pivot point of an object, it will tend to rotate the object.
Torque • centric force • applied through axis (center) of rotation • creates no torque so causes no rotation • eccentric force • applied some distance away from axis of rotation • creates torque so causes rotation
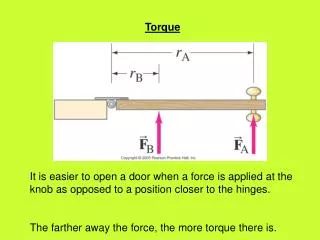
Will the green person go up or down? Which door is easier to open?
What causes a limb to rotate -force or torque? • angular motion occurs at a joint, so torque causes the limb to rotate • torque is developed because a force acts at a distance from the axis of rotation muscle force (Fm) muscle torque (Tm=Fm*dm) Perpendicular distance between pt of application and joint axis (dm)
400 N Calculation of Muscle Torque NOTE: The torque created by the muscle depends on 1) the size of the muscle force 2) the angle at which the muscle pulls 3) the perpendicular distance from the muscle to the joint axis
Fm= ? 0.45 m 0.02 m 0.15 m Wfa=13.35 N Wbb=44.5 N Example
Give me a lever long enough and a fulcrum strong enough, and, single-handedly, I can move the world. --Archimedes (287 - 212 B.C.)
Levers • A lever consists of two forces (motive and resistance forces) acting around a pivot point (axis or fulcrum). • The perpendicular distance from the line of action of the effort force to the fulcrum is called the motive arm. • The perpendicular distance from the line of action of the resistance force to the fulcrum is called the resistance arm.
resistance force motive force (effort force) resistance arm motive arm Elements of a Lever axis (fulcrum)
Mechanical Advantage of a Lever • MA = • The ratio of the motive arm to the resistance arm is called the mechanical advantage (MA). • If MA is approximately 1 the lever simply acts to redirect the applied force. • If MA is > 1 the lever acts to amplify the force. • If MA is < 1 the lever acts to amplify the speed and range of motion.
motive force direction of the force vector is redirected MA = 1 motive arm = resistance arm
motive force MA > 1 motive arm > resistance arm force is amplified
motive force MA < 1 motive arm < resistance arm ROM / speed is amplified
Muscles have MA <1 0.45 m (resistance arm) 0.02 m (motive arm) 0.15 m (resistance arm) motive arm < resistance arms
Mechanical Advantage • Muscles typically have a MA in ROM and speed. Classes of Levers • Classified according to the relative positions of the axis, motive force and resistive force.
How to remember the class of lever ARM 1st classAxis is between resistance and motive force. 2nd classResistance force is in between the axis and the motive force. 3rd classMotive force is in between the axis and the resistance force.
1st Class Lever • axis in the middle • e.g. see-saw • most versatile lever because it can be used for any type of mechanical advantage • e.g. in body • pushing down gas pedal • elbow/triceps extensions overhead
2nd Class Lever • resistance in middle • force advantage usually exists for motive force • e.g. push-up • body is lever, feet are axis, resistance is weight of body and motive is arms
3rd Class Lever • motive in middle • most musculoskeletal arrangements are 3rd class levers • muscle is motive force • advantage in ROM and speed but disadvantage in F
Gears • A gear is similar in function to a lever. • The torque on the wheel and the gear is the same. • The moment arms are different and therefore the forces are different.
Equilibrium – Linear Components V W W Fr Fp Ry Ry Fr = resistive force Fp = propulsive force if v = 0 andSF = 0 DYNAMIC EQUILIBRIUM if Ry = W then resultant force = 0 if v = 0 andSF = 0 STATIC EQUILIBRIUM
Equilibrium – Angular Components T1 T2 If the object is rotating with a non-zero velocity and… if T1 = T2 then resultant torque = 0 if w = 0 andST = 0 STATIC EQUILIBRIUM T1=T2 DYNAMIC EQUILIBRIUM b/c w = constant andST = 0
Stability • Stability is the resistance to linear and angular acceleration. • There are 3 major factors that influence the stability of an object.
unstable stable 2) The height of the center of mass.
10 kg 100kg unstable stable 3) The mass.
Center of Mass • The center of mass is the point about which the body's mass is evenly distributed. • The line of gravity is the line that defines the center of mass in the transverse plane. • The sum of the torques about an axis caused by the weights of multiple particles is equal to the distance from the axis to the center of mass multiplied by the sum of the weights.
Center of Mass • The center of mass is the point about which the body's mass is evenly distributed. balance point Asymmetric distribution CM closer to larger weight Symmetric distribution CM in the middle
Y 2 kg (1,3) 3 kg (3,3) 3 1 COM (2, 2.67) 1 kg (1,1) 2 X The sum of the torques about an axis caused by the weights of multiple particles is equal to the distance from the axis to the center of mass multiplied by the sum of the weights. line of gravity (if Y is vertical)
2 kg (1, 3) 3 kg (3, 3) Y 1 3 COM (2, 2.67) 1 kg (1,1) 2 X COM Location in the x direction m1x1 + m2x2 + m3x3 = Mxcm 2kg(1m) + 1kg(1m) + 3kg(3m) = 6kgxcm xcm = = 2 m
2 kg (1, 3) 3 kg (3, 3) Y 1 3 COM (2, 2.67) 1 kg (1,1) 2 X COM Location in the y direction m1y1 + m2y2 + m3y3 = Mycm 2kg(3m) + 1kg(1m) + 3kg(3m) = 6ycm ycm = = 2.67 m
General Formulas: where, xi is the distance from the y-axis to the ith mass yi is the distance from the x-axis to the ith mass mi is the mass of the ith element (segment)
An alternative approach is to use the proportion of each mass (pi) instead of the actual masses. For the human body the proportion can be found in many text books for each body segment.
Y X
Body Segment Parameters Derived from direct cadaver measurements Elderly, male, Caucasian cadavers From these data it is apparent that to determine the center of mass of a segment it is necessary to locate the segment endpoints
Y X
Y X
Y To locate the segment CM 1st measure the length of the segment 6.8 cm X
Y CM of the trunk is 43.8% of the length of the trunk away from the suprasternale 43.8% of 6.8 cm = 3.0 cm 3.0 cm X
Y to find the whole body CM you need to express the segmental CM locations with respect to a common reference point - we’ll use the origin xi yi X
Y Do this for every segment Use these distances and the segment masses to compute the whole body CM location xi yi X
Y Plot the final coordinates of the CM X-distance = 120 mm Y-distance = 92 mm X
A basketball player can appear to remain at a constant height for brief periods of time by manipulating the body segments about their center of mass. The COM will always follow the path of a parabola while the body is in the air. (Michael Jordan is very good at this.)
Moment of Inertia Resistance to angular motion (like linear motion) is dependent on mass. The more closely mass is distributed to the axis of rotation, the easier it is to rotate. therefore: resistance to angular motion is dependent on the distribution of mass This resistance is called the Moment of Inertia.
Moment of Inertia • ANGULAR FORM OF INERTIA • resistance to changes in the state of angular motion • I = mr2 • for a single particle I is proportional to the distance squared • SI unit = kg-m2
x Each block is .5 m by 1.5 m and has a mass of 2 kg. The mass in each block is uniformly distributed. What is the moment of inertia about the x axis? Ix = Smiri2 = [2kg*(.25m)2] + [2kg*.75m)2] + [2*(.25m)2] + [2kg*(.75m)2] = 2.5 kg-m2
x If the mass of the above object were concentrated at a single point (the center of mass) how far from the axis would it have to be located to have the same moment of inertia?Ix = 2.5kg-m2 = mk2 = 8kg*k2 k = = .559 m
This value is called the radius of gyration: distance from axis of rotation to a point where the body’s mass could be concentrated without altering its rotational characteristics for a system of particles I = mk2 where k = ‘radius of gyration’ It is often expressed as a proportion of the segment length in biomechanics. Thus, I = m(rl)2 where I is the moment of inertiar is the radius of gyration as a proportion of the segment length (l)