Download
1 / 54
560 likes | 917 Vues
等效源法在 FEKO 中的应用 波导阵列天线 FEKO V5.4 系列培训. 安世亚太 (PERA Global) 科技 ( 北京 ) 有限公司. 概述. 为什么采用等效方法 ( 必要性 ) 对于复杂 ( 如计算未知量大 ) 的问题 ( 如天线罩、天线布局等 ), 可以通过问题的分解,有效地采用近场或远场等效的方法来把问题简化,降低计算的复杂度,使不能或勉强可以求解的问题能够求解; 可以有效地提高问题的计算效率 FEKO 中的等效方法列举

E N D
等效源法在FEKO中的应用波导阵列天线FEKO V5.4系列培训 安世亚太(PERA Global)科技(北京)有限公司
概述 • 为什么采用等效方法(必要性) • 对于复杂(如计算未知量大)的问题(如天线罩、天线布局等), 可以通过问题的分解,有效地采用近场或远场等效的方法来把问题简化,降低计算的复杂度,使不能或勉强可以求解的问题能够求解; • 可以有效地提高问题的计算效率 • FEKO中的等效方法列举 • 近场等效法(AP):对于辐射体(天线、设备等)的空间辐射, 可以用封闭(或非完全封闭)包络面上的辐射近场来等效, 即用辐射体的近场作为二次辐射源 • 远场等效法(AR): 对于辐射体(天线、设备等)的空间辐射, 可以采用其远场辐射数据来等效该辐射体的空间辐射, 即把辐射体作为一个点源, 采用远场等效一般要考虑的条件即原则: • R >= 2*lambda*D/(pi^2) 其中D为最大辐射方向系数,lambda是空气中的工作波长,R是辐射体与载体(天线罩、辐射体的载体等)之间的距离 • 电偶极子(A5)与磁偶极子(A6): 任何一个辐射源都可以等效为多个电偶极子与磁偶极子的组合, 所以近场等效中的AP卡最终都转换成多个A5+A6的组合 • 通过计算得到的近场磁场借助于公式I_e = (n x H)*dA得到A5的幅度; • 通过计算得到的近场电场借助于公式I_m = (-n x E)*dA 得到A6的辐射; • 这些等效方法主要的应用场合: • 1:天线罩、2:反射面及阵列天线、3: 多天线布局、4:包括多个辐射源的复杂系统EMC、5: 等等
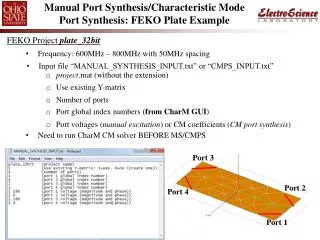
定义9个近场计算区域 举例说明 • 以3x3矩形阵列天线为例, 采用参数化来演示AP卡在FEKO中的应用 • 练习FE卡的使用(注意FE的排列顺序是按照其名称来进行排序的(***)、每一个FE卡计算得到的近场数据由定义的Start和End来决定-可以通过亲自调整来体会) • 练习AP卡的使用(AP卡是通过读取FE计算得到的近场数据,所以对于多个AP要注意其顺序) • 采用辐射体周围非封闭包络面(口径面-取主要贡献)上的场信息来模拟其辐射
目的 • 通过该教程达到以下目的: • 1、熟练掌握FEKO的操作; • 2、FEKO中近场的设定及计算 • 3、FEKO中AP卡的设定 • 4、了解近场计算(FE)中的设定参数与AP卡中设定的参数之间的关系,这非常重要:
CadFEKO工作界面描述 工作菜单 视图及工作平面工具条 参数定义 选择模型中的体 选择模型中的面 选择模型中的棱 显示工作平面的网格 切面视图 显示工作平面 3D视图 树形管理器 介质定义 模型创建 网格创建 端口定义 建模及模型处理 求解 定义 电参数设置 优化定义 模型及网格属性 消息窗口
定义主要的参数 • 打开Cadfeko, 创建“horn_array_3x3.cfx” • 通过双击“树形管理器”中的参数定义“Variables”节点添加参数: • 依次定义以下主要参数: • freq=3.0e9 • lam = c0/freq • sf=0.001 • step=lam/2 • steps=step*2 • wg_a=72*sf • wg_b=34*sf • wg_L=90*sf • flare_a=72*sf • flare_b=100*sf • flare_h=100*sf • horn_w=flare_a*0.9 • horn_h=flare_b*0.9 • n_x=11 • n_y=21
定义计算近场: NearField1 • 在“树形管理器”选中“Solution->Calculation”点击鼠标右键选择“Request near fields”: • Postion: • Start: (-horn_h/2, -horn_w/2,0); End: (horn_h/2, horn_w/2,0) • Increment: (horn_h/(n_x-1), horn_w/(n_y-1),0) • Coordinate: • Coordinate System: Cartesian • Origin: (-steps, -steps-lam/60/2, 0) • Label: NearField1 • Advanced: 选中Export fields to ASCII file (*.efe, *.hfe) • Create 所计算口径区域的中心位置
定义计算近场: NearField2 • 定义NearField2 • Postion: (与NearField1相同的设置) • Start: (-horn_h/2, -horn_w/2,0); End: (horn_h/2, horn_w/2,0) • Increment: (horn_h/(n_x-1), horn_w/(n_y-1),0) • Coordinate: • Coordinate System: Cartesian • 修正 Origin: (0, -steps-lam/60/2, 0) • Label: NearField2 • Advanced: 选中Export fields to ASCII file (*.efe, *.hfe) • Create 所计算口径区域的中心位置
定义计算近场: NearField3 • 定义NearField3 • Postion: (与NearField1相同的设置) • Start: (-horn_h/2, -horn_w/2,0); End: (horn_h/2, horn_w/2,0) • Increment: (horn_h/(n_x-1), horn_w/(n_y-1),0) • Coordinate: • Coordinate System: Cartesian • 修正 Origin: (steps, -steps-lam/60/2, 0) • Label: NearField3 • Advanced: 选中Export fields to ASCII file (*.efe, *.hfe) • Create 所计算口径区域的中心位置
定义计算近场: NearField4 • 定义NearField4 • Postion: (与NearField1相同的设置) • Start: (-horn_h/2, -horn_w/2,0); End: (horn_h/2, horn_w/2,0) • Increment: (horn_h/(n_x-1), horn_w/(n_y-1),0) • Coordinate: • Coordinate System: Cartesian • 修正 Origin: (-steps, 0, 0) • Label: NearField4 • Advanced: 选中Export fields to ASCII file (*.efe, *.hfe) • Create
定义计算近场: NearField5 • 定义NearField5 • Postion: (与NearField1相同的设置) • Start: (-horn_h/2, -horn_w/2,0); End: (horn_h/2, horn_w/2,0) • Increment: (horn_h/(n_x-1), horn_w/(n_y-1),0) • Coordinate: • Coordinate System: Cartesian • 修正 Origin: (0, 0, 0) • Label: NearField5 • Advanced: 选中Export fields to ASCII file (*.efe, *.hfe) • Create
定义计算近场: NearField6 • 定义NearField6 • Postion: (与NearField1相同的设置) • Start: (-horn_h/2, -horn_w/2,0); End: (horn_h/2, horn_w/2,0) • Increment: (horn_h/(n_x-1), horn_w/(n_y-1),0) • Coordinate: • Coordinate System: Cartesian • 修正 Origin: (steps, 0, 0) • Label: NearField6 • Advanced: 选中Export fields to ASCII file (*.efe, *.hfe) • Create
定义计算近场: NearField7 • 定义NearField7 • Postion: (与NearField1相同的设置) • Start: (-horn_h/2, -horn_w/2,0); End: (horn_h/2, horn_w/2,0) • Increment: (horn_h/(n_x-1), horn_w/(n_y-1),0) • Coordinate: • Coordinate System: Cartesian • 修正 Origin: (-steps, -steps-lam/60/2, 0) • Label: NearField7 • Advanced: 选中Export fields to ASCII file (*.efe, *.hfe) • Create
定义计算近场: NearField8 • 定义NearField8 • Postion: (与NearField1相同的设置) • Start: (-horn_h/2, -horn_w/2,0); End: (horn_h/2, horn_w/2,0) • Increment: (horn_h/(n_x-1), horn_w/(n_y-1),0) • Coordinate: • Coordinate System: Cartesian • 修正 Origin: (0, -steps-lam/60/2, 0) • Label: NearField8 • Advanced: 选中Export fields to ASCII file (*.efe, *.hfe) • Create
定义计算近场: NearField9 • 定义NearField9 • Postion: (与NearField1相同的设置) • Start: (-horn_h/2, -horn_w/2,0); End: (horn_h/2, horn_w/2,0) • Increment: (horn_h/(n_x-1), horn_w/(n_y-1),0) • Coordinate: • Coordinate System: Cartesian • 修正 Origin: (steps, -steps-lam/60/2, 0) • Label: NearField9 • Advanced: 选中Export fields to ASCII file (*.efe, *.hfe) • Create • Close
设定计算方法及计算运行 • 点击菜单“Solution->solution setting” • 选择MLFMM算法 • 点击菜单“File->Save as”, 把该工程存储为“horn_array_3x3.cfx” • 点击“Run->runfeko”开始运行
结果显示-3D • 在Cadfeko中点击“Run->PostFEKO” 2 1 3 4
结果显示-2D:远场方向图 1 3 2
结果显示-2D:远场方向图 6 4
采用近场等效的方法来处理 • 在Cadfeko中, 点击菜单“File->Save as”, 创建新的工程文件“horn_array_3x3_Aperture_Source.cfx” • 以下所有的操作都是针对工程文件“horn_array_3x3_Aperture_Source.cfx”来进行 • 删除“树形管理器”Mesh节点中的内容: “Union1”、“Union1_1”、“Union1_2” • 展开Solution->Excitations, 同时选中“WaveguideExcitation1”到“WaveguideExcitation9”, 点击鼠标右键选择“Delete”, 或者选择“Include/Exclude”(抑制掉)
采用近场等效的方法来处理 • 展开Solution->Calculation中的Near fields中,同时选中“NearField1”到“NearField9”, 点击“Delete”或“Include/Exclude”;
采用近场等效的方法来处理 • 在3D视图中修正模型的坐标拾取模式为“Geometry point” • 在3D视图区域点击鼠标右键, 选择“Snap to->Geometry point”
采用近场等效的方法来处理 • 双击“树形管理器”中的“Name Points”, 定义9个点分别为(每个口径坐标最小的顶点): • NP_1: (-0.135930819333, -0.151596332989,0) • NP_2: • NP_3: • NP_4: • NP_5: • NP_6: • NP_7: • NP_8: • NP_9: 注意:3D视图中的坐标视角位置 拾取方法说明 注释: 1> 把光标定在Point区域; 2>同时按住Ctrl和Shift键不放; 3>在3d视图中移动鼠标到需要拾取的模型点的位置, 点击鼠标左键确认; 4>点击Create完成
采用近场等效的方法来处理 • 双击“树形管理器”中的“Name Points”, 定义9个点分别为: • NP_2: (-0.036, -0.151596332989, 0) • NP_3: • NP_4: • NP_5: • NP_6: • NP_7: • NP_8: • NP_9:
采用近场等效的方法来处理 • 双击“树形管理器”中的“Name Points”, 定义9个点分别为: • NP_3: (0.0639308193334, -0.151596332989,0.0) • NP_4: • NP_5: • NP_6: • NP_7: • NP_8: • NP_9:
采用近场等效的方法来处理 • 双击“树形管理器”中的“Name Points”, 定义9个点分别为: • NP_4: (-0.135930819333, -0.05,0.0) • NP_5: • NP_6: • NP_7: • NP_8: • NP_9:
采用近场等效的方法来处理 • 双击“树形管理器”中的“Name Points”, 定义9个点分别为: • NP_5: (-0.036, -0.05, 0.0) • NP_6: • NP_7: • NP_8: • NP_9:
采用近场等效的方法来处理 • 双击“树形管理器”中的“Name Points”, 定义9个点分别为: • NP_6: (0.0639308193334, -0.05, 0) • NP_7: • NP_8: • NP_9:
采用近场等效的方法来处理 • 双击“树形管理器”中的“Name Points”, 定义9个点分别为: • NP_7: (-0.135930819333, 0.0515963329889, 0) • NP_8: • NP_9:
采用近场等效的方法来处理 • 双击“树形管理器”中的“Name Points”, 定义9个点分别为: • NP_8: (-0.036, 0.0515963329889, 0) • NP_9:
采用近场等效的方法来处理 • 双击“树形管理器”中的“Name Points”, 定义9个点分别为: • NP_9: (0.0639308193334, 0.0515963329889, 0)
采用近场等效的方法来处理: 定义激励 • 展开Solution选中Excitations, 点击鼠标右键选择“Aperture field source”
采用近场等效的方法来处理: 定义激励 1 • Excitation: • Use Global coordinates: 选中 • Magnitude scale factor: 1 • Phase of aperture (deg): 0 • Aperture data type: 采用默认 • Source Type: 采用默认 • E-field file: 点击Browse按钮选择“horn_array_3x3.efe”文件 • H-field file:点击Browse按钮选择“horn_array_3x3.hfe”文件 • Start reading from line number: 1 • Coordinate system: Cartesian • Also sample along edges: 选中 • Width(W): horn_h • Height(H): horn_w • Number of points along X/U: n_x • Number of points along Y/U: n_y • Label: ApertureExcitation1 • Coordinates: • Origin: • X: NP_1.x+(flare_b-horn_w)/2 • Y: NP_1.y+(flare_a-horn_h)/2 • Z: NP_1.z • Create
采用近场等效的方法来处理: 定义激励 2 • Excitation: • Use Global coordinates: 选中 • Magnitude scale factor: 1 • Phase of aperture (deg): 0 • Aperture data type: 采用默认 • Source Type: 采用默认 • E-field file: 点击Browse按钮选择“horn_array_3x3.efe”文件 • H-field file:点击Browse按钮选择“horn_array_3x3.hfe”文件 • 修正: Start reading from line number: 1+n_x*n_y • Coordinate system: Cartesian • Also sample along edges: 选中 • Width(W): horn_h • Height(H): horn_w • Number of points along X/U: n_x • Number of points along Y/U: n_y • 修正: Label: ApertureExcitation2 • Coordinates: • 修正: Origin: • X: NP_2.x+(flare_b-horn_w)/2 • Y: NP_2.y+(flare_a-horn_h)/2 • Z: NP_2.z • Create
采用近场等效的方法来处理: 定义激励 2 1+n_x*n_y
采用近场等效的方法来处理: 定义激励 3 • Excitation: • Use Global coordinates: 选中 • Magnitude scale factor: 1 • Phase of aperture (deg): 0 • Aperture data type: 采用默认 • Source Type: 采用默认 • E-field file: 点击Browse按钮选择“horn_array_3x3.efe”文件 • H-field file:点击Browse按钮选择“horn_array_3x3.hfe”文件 • 修正: Start reading from line number: 1+n_x*n_y*2 • Coordinate system: Cartesian • Also sample along edges: 选中 • Width(W): horn_h • Height(H): horn_w • Number of points along X/U: n_x • Number of points along Y/U: n_y • 修正: Label: ApertureExcitation3 • Coordinates: • 修正: Origin: • X: NP_3.x+(flare_b-horn_w)/2 • Y: NP_3.y+(flare_a-horn_h)/2 • Z: NP_3.z • Create
采用近场等效的方法来处理: 定义激励 4 • Excitation: • Use Global coordinates: 选中 • Magnitude scale factor: 1 • Phase of aperture (deg): 0 • Aperture data type: 采用默认 • Source Type: 采用默认 • E-field file: 点击Browse按钮选择“horn_array_3x3.efe”文件 • H-field file:点击Browse按钮选择“horn_array_3x3.hfe”文件 • 修正: Start reading from line number: 1+n_x*n_y*3 • Coordinate system: Cartesian • Also sample along edges: 选中 • Width(W): horn_h • Height(H): horn_w • Number of points along X/U: n_x • Number of points along Y/U: n_y • 修正: Label: ApertureExcitation4 • Coordinates: • 修正: Origin: • X: NP_4.x+(flare_b-horn_w)/2 • Y: NP_4.y+(flare_a-horn_h)/2 • Z: NP_4.z • Create
采用近场等效的方法来处理: 定义激励 5 • Excitation: • Use Global coordinates: 选中 • Magnitude scale factor: 1 • Phase of aperture (deg): 0 • Aperture data type: 采用默认 • Source Type: 采用默认 • E-field file: 点击Browse按钮选择“horn_array_3x3.efe”文件 • H-field file:点击Browse按钮选择“horn_array_3x3.hfe”文件 • 修正: Start reading from line number: 1+n_x*n_y*4 • Coordinate system: Cartesian • Also sample along edges: 选中 • Width(W): horn_h • Height(H): horn_w • Number of points along X/U: n_x • Number of points along Y/U: n_y • 修正: Label: ApertureExcitation5 • Coordinates: • 修正: Origin: • X: NP_5.x+(flare_b-horn_w)/2 • Y: NP_5.y+(flare_a-horn_h)/2 • Z: NP_5.z • Create
采用近场等效的方法来处理: 定义激励 6 • Excitation: • Use Global coordinates: 选中 • Magnitude scale factor: 1 • Phase of aperture (deg): 0 • Aperture data type: 采用默认 • Source Type: 采用默认 • E-field file: 点击Browse按钮选择“horn_array_3x3.efe”文件 • H-field file:点击Browse按钮选择“horn_array_3x3.hfe”文件 • 修正: Start reading from line number: 1+n_x*n_y*5 • Coordinate system: Cartesian • Also sample along edges: 选中 • Width(W): horn_h • Height(H): horn_w • Number of points along X/U: n_x • Number of points along Y/U: n_y • 修正: Label: ApertureExcitation6 • Coordinates: • 修正: Origin: • X: NP_6.x+(flare_b-horn_w)/2 • Y: NP_6.y+(flare_a-horn_h)/2 • Z: NP_6.z • Create
采用近场等效的方法来处理: 定义激励 7 • Excitation: • Use Global coordinates: 选中 • Magnitude scale factor: 1 • Phase of aperture (deg): 0 • Aperture data type: 采用默认 • Source Type: 采用默认 • E-field file: 点击Browse按钮选择“horn_array_3x3.efe”文件 • H-field file:点击Browse按钮选择“horn_array_3x3.hfe”文件 • 修正: Start reading from line number: 1+n_x*n_y*6 • Coordinate system: Cartesian • Also sample along edges: 选中 • Width(W): horn_h • Height(H): horn_w • Number of points along X/U: n_x • Number of points along Y/U: n_y • 修正: Label: ApertureExcitation7 • Coordinates: • 修正: Origin: • X: NP_7.x+(flare_b-horn_w)/2 • Y: NP_7.y+(flare_a-horn_h)/2 • Z: NP_7.z • Create
采用近场等效的方法来处理: 定义激励 8 • Excitation: • Use Global coordinates: 选中 • Magnitude scale factor: 1 • Phase of aperture (deg): 0 • Aperture data type: 采用默认 • Source Type: 采用默认 • E-field file: 点击Browse按钮选择“horn_array_3x3.efe”文件 • H-field file:点击Browse按钮选择“horn_array_3x3.hfe”文件 • 修正: Start reading from line number: 1+n_x*n_y*7 • Coordinate system: Cartesian • Also sample along edges: 选中 • Width(W): horn_h • Height(H): horn_w • Number of points along X/U: n_x • Number of points along Y/U: n_y • 修正: Label: ApertureExcitation8 • Coordinates: • 修正: Origin: • X: NP_8.x+(flare_b-horn_w)/2 • Y: NP_8.y+(flare_a-horn_h)/2 • Z: NP_8.z • Create
采用近场等效的方法来处理: 定义激励 9 • Excitation: • Use Global coordinates: 选中 • Magnitude scale factor: 1 • Phase of aperture (deg): 0 • Aperture data type: 采用默认 • Source Type: 采用默认 • E-field file: 点击Browse按钮选择“horn_array_3x3.efe”文件 • H-field file:点击Browse按钮选择“horn_array_3x3.hfe”文件 • 修正: Start reading from line number: 1+n_x*n_y*8 • Coordinate system: Cartesian • Also sample along edges: 选中 • Width(W): horn_h • Height(H): horn_w • Number of points along X/U: n_x • Number of points along Y/U: n_y • 修正: Label: ApertureExcitation9 • Coordinates: • 修正: Origin: • X: NP_9.x+(flare_b-horn_w)/2 • Y: NP_9.y+(flare_a-horn_h)/2 • Z: NP_9.z • Create