Quantitative Seismology: Reciprocity Theorems and Bettis Theorem Representation
280 likes | 315 Vues
In chapters 2 and 3 of quantitative seismology, explore reciprocity theorems, including Bettis' theorem, with a focus on body-force equivalents and moment tensors. Learn about representation theorems and their application to displacement fields, traction discontinuities, and slip jumps. Understand how to localize displacement and calculate body-force equivalents in inhomogeneous anisotropic media. Discover the significance of slip discontinuities and double couples in fault planes. Dive into the distribution of body-force over surfaces for deeper insights. Take a break from the technicalities as you navigate through the various topics presented in the chapters.

Quantitative Seismology: Reciprocity Theorems and Bettis Theorem Representation
E N D
Presentation Transcript
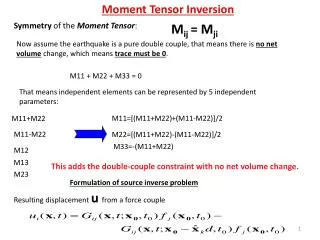
Representation theoremequivalent body forceMoment tensor QUANTITATIVE SEISMOLOGY CHAPTER 2. and 3.
Bettis theorem • no initial conditions involved for u or v • It remains true if u, utt, T(u,n), f are evaluated at t1 but v, vtt, T(v,n), g are evaluated at a different time t2. • Choose t1=t and t2=τ-t and integrate from 0 to τ acceleration terms reduced to terms that depend only on the initial and final values.
Introducing Green function … ith component displacement at (x,t) due to an nth unit impulse force acting at x=ξ and t=ι
Representation theorem Interchange space and time symbols
Representation theorems for an internal surface; body-force equivalents for discontinuities in Traction and displacement S Σ+ Σ- v
(Spatial reciprocity of G is applied) S Σ+ Σ- Σ++Σ-+S Assume both G and u satisfy homogeneous boundary conditions on S S itself is no longer our concern
body-force equivalents What are body-force equivalents mean ?
Traction discontinuity contributes to displacement field (Delta function is used to “localized” T on Σ within V)
displacement discontinuity contributes to displacement How to localize [u] on Σ within V ?
body-force equivalent of a displacement discontinuity on Σ The body-force equivalents hold for a general inhomogeneous anisotropic medium, and they are remarkable in their dependence on properties of the elastic medium only at the fault surface itself.
ξ3 Slip jump as a buried faulting [u]=uΣ+ - uΣ- ξ2 ξ1 Σ • Σ lies in the ξ3plane • Isotropic media • Let ξ1 the direction of slip
In isotropic medium, other C13pq vanish, except C1313=C1331=μ Point forces distributed over the plane η3=0- and η3=0-
Similarly, we may find the moment due to f3 • total moment from f1 and f3 =0 • body-force equivalents from slip discontinuity across the fault plane double couple
η3 η3 -δ(η3) η1 η1 What does this mean ? See figure 3.3 for the distribution of body-force over the Σ plane