
Problem solved?
E N D
Presentation Transcript
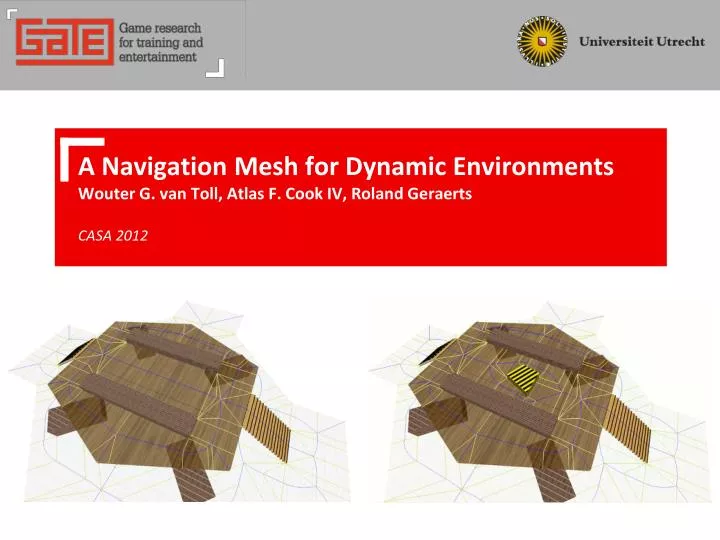
A Navigation Mesh for Dynamic EnvironmentsWouter G. van Toll, Atlas F. Cook IV, Roland GeraertsCASA 2012
Motivation • Path planning in games and simulations • Send virtual characters from start to goal • Increasing desire for efficiency and realism • Characters: smooth movement, collision avoidance, … • Environments: complex (2.5D), dynamic, … • Foundation: a navigation mesh • Subdivision of the walkable space into 2D polygons • Allows smooth, flexible movement • Our framework: corridors • Based on the 2D medial axis Contribution:dynamic updates
Preliminaries: 2D medial axis The set of all points with at least two closest obstacle points • Medial axis: • Pruned version ofthe Voronoi diagram • Subdivision into cellswith 1 closest obstacle • A useful roadmap • Maximum clearance to obstacles • Preserves connectivity
Preliminaries: Explicit Corridor Map • ECM: Annotated medial axis (Geraerts, 2010) • Bisector vertices storea closest obstacle pointon both sides • Exact subdivision of the walkable space An efficient nav. mesh • O(n) storage • O(n log n) build time
Preliminaries: Explicit Corridor Map • Some features of the ECM • Clearance information • Supports all character sizes • Global planning on the MA • Result: path + corridor • Following indicative routes • Short paths with clearance • Local forces can be added • Collision avoidance • Group coherence • Multi-layered environments • Dynamic updates
Contribution: Local updates • Dynamic environments can change locally • E.g. collapsing bridges, newly built roads, … • Complete navmesh reconstruction is expensive! • Local operations: adding/removing obstacles • Update the mesh only where it is necessary • Recall: The ECM is an annotated medial axis • We use Voronoi algorithms; skip the annotations today 1. Inserting a point among points 2. Inserting a point among polygons 3. Inserting a polygon among polygons 4. Deleting an obstacle
1. Inserting a point among points • Insertion = 1 step of incremental construction • Let Cjbe the Voronoi cell of point pj • Let p be the point to add • Algorithm (Green and Sibson, 1978) • Find the cell Ci in which p lies • Compute the bisector of p and pi • Find the intersections of bisector and Ci • Compute new neighbor + bisector • Iterate until the new cell is finished • Remove the old edges • Complexity: O(log n + k) • n = number of points • k = complexity of the new cell
2. Inserting a point among polygons • What if the other obstacles are polygons? • Bisector edges are chains of line/parabola segments • A bisector vertex (BV) marks a switch • BV occurs when the edge intersects a surface normal • Adapted insertion algorithm • In each iteration, choose the 1st of 2 intersections
3. Inserting polygon among polygons • What if the inserted obstacleP is a line or polygon? • P can also induce bisector vertices • Adapted insertion algorithm • In each iteration, choose the 1st of 3 intersections • With the Voronoi cell • With the neighbour’s normal vector • With P’s normal vector
4. Deleting an obstacle • Deleting P: the cell CP needs to be removed • Its interior must be filled in with new edges • These can only come from P’s neighbors! • Deletion algorithm • Compute NP, set of P’s neighbors • Build the medial axis for NP • Connect the old/new medial axes • Delete the boundary of CP • Complexity: O(m log m) • m = number of neighbors for P
Experimental results • 1. Inserting random points into an empty scene • Incremental insertion • Local updates vs. global reconstruction • Local: Always fast (< 1 ms) • Global: Slower, depends on #points so far
Experimental results (2) • 2. Inserting polygons into various scenes • Running times: 1.3ms to 2.5ms • Efficiency depends on the new cell’s complexity In practice, most updates will be very local Fast enough for real-time updates!
Experimental results (3) • 3. Deleting polygons from various scenes • Same polygons/scenes as before • Running times: 1.2ms to 5.4ms • Efficiency depends on the old cell’s complexity • 4. Moving a polygon through various scenes • Re-insert the polygon into a static version • Running times below 1.5ms We can handle multiple moving obstacles in real-time
Conclusions • Algorithms for updating a navigation mesh • Based on Voronoi diagram techniques • Insertions of points and polygons • Deletions based on insertions • Implementation and experiments • Insertions: real-time performance • Deletions: slower, but still applicable • Movement: real-time insertions into a static scene • Applications in 2D and 2.5D demo 1 demo 2
Future work Goal: a generic path planning framework for games and simulations
Thank you • Contact • Roland Geraerts • R.J.Geraerts@uu.nl • http://www.staff.science.uu.nl/~gerae101