Flexible Needle Steering
200 likes | 553 Vues
Flexible Needle Steering. BM 632: Medical Instrumentation Nishant Kumar Department of Mechanical Engineering Indian Institute of Technology, Mumbai. Problem Definition.

Flexible Needle Steering
E N D
Presentation Transcript
Flexible Needle Steering BM 632: Medical Instrumentation Nishant Kumar Department of Mechanical Engineering Indian Institute of Technology, Mumbai
Problem Definition • Percutaneous procedures involving needle insertions include vaccinations, blood/fluid sampling, regional anesthesia, tissue biopsy, catheter insertion, cryogenic ablation, electrolytic ablation, brachytherapy, neurosurgery, deep brain simulation, minimally invasive surgeries and more. • Thick and non-flexible needles are easily pointed to the target in the existence of a visualization system, but their manipulation causes significant pressure on the tissue. Moreover, straight needles are not suitable for following curved paths, if obstacle avoidance is required. • These problems can be solved by using thin and flexible needles.
Problem Definition • Thin and flexible needles cause less pain to the patient, e.g. PDPH (Post Dural Puncture Headache) is reduced. However, flexible needle steering deep inside the tissue is very complicated. Also, the accuracy is limited due to obstacles in the needle’s path, shifts in target position due to tissue deformation, and undesired bending of the needle after insertion. • Errors in needle targeting can mitigate the effectiveness of diagnosis or therapy. Biopsies, for example, can not completely rule out malignancy due to inaccuracy in positioning the needle tip. Also, radioactive seeds in prostrate brachytherapy are often placed at locations substantially different than those preplanned for optimal dosage. • Hence, an optimal needle steering mechanism is required.
Problem Definition • The figures below show the possible paths taken by the needle to reach the target. The problem under discussion is how to plan the optimum path, and how to achieve it.
Solution • Flexible needles made of super elastic metal alloys (e.g. NiTinol, 0.15 mm diameter, bevel angle 20º) are used. • Bevel-tipped (asymmetrical) needles are used. • Various mechanical models are used to represent the needle-tissue system. • Issues of uncertainty in the position of the needle are handled by mathematical tools such as Markov Decision Process and Dynamic Programming. • The first step in all these procedures is acquiring real-time medical images and to implement computer vision algorithms to segment the obstacles (bones, nerves etc) and target.
Two velocity inputs are required for steering the needle: Insertion speed Rotation speed, actuated from the base of the needle. The left part of the assembly show here controls the needle insertion while the motor on the right hand side rotates the needle shaft. Insertion pushes the needle deeper into the tissue, while rotation re-orients the bevel at the needle tip. Needle Steering Mechanism
The needle and the tissue together are modeled as a Nonholonomic system. A nonholonomic system is one whose state depends on the path taken to achieve it. Such a system is described by a set of parameters subject to differential constraints. Bicycle is an example of a nonholonomic system, because its outcome is path-dependent. In order to know its exact configuration, especially location, it is necessary to know not only the configuration of its parts, but also their histories: how they have moved over time. Needle-Tissue Models http://inversioninc.com/nonholonomic.html
Virtual Springs Model • Assuming small displacements the needle can be approximated by a linear beam subjected to point forces as shown in the figure. With appropriate elements spacing, this approximation becomes close to a flexible beam on an elastic foundation model. At each joint, the force applied by the virtual spring is proportional to the spring’s displacement from its initial position: F= ki(wi – woi), where ki is the virtual spring coefficient, wi – displacement at point i, woi – position of freed spring i.
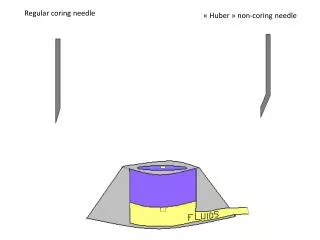
A symmetric tip needle exerts forces on the tissue equally in all directions, so it can cut the tissue only in the direction that the tip is moving. A bevel tip needle exerts forces asymmetrically and cuts tissue at an offset angle depending on the tissue properties and bevel angle. When inserted into soft tissue, the steerable bevel tip needle will follow a path of constant radius of curvature, which is a property of the needle and the tissue. Asymmetry of the needle tip
Needle parameters • The state of a steerable needle during insertion is characterized by tip position p, tip orientation angle θ, and bevel direction b. In the first figure, b = 0 (bevel-left) and the needle tip is following a constant curvature path in the counter-clockwise direction. Rotating the needle about its base changes the bevel direction but does not affect needle position.
Needle Steering • Needle insertion is done in discrete steps δ. An action circle of radius r is defined where r is the radius of curvature of the needle. Each point c on the action circle represents an orientation angle θ of the needle, where θ is the angle of the tangent of the circle at c with respect to the z-axis. The needle will trace an arc of length δ along the action circle in a CCW direction for b = 0, and in the CW direction for b = 1 (b = bevel direction).
Actuator Controls • The needle is steered by the rotation of the needle shaft during insertion. • A straight trajectory is achieved by spinning the needle at a constant rate during insertion. • Hence, arbitrary trajectories can be achieved by combining short segments, some straight and some curved, as desired. • Any curvature between these two limits (with and without spinning) can be achieved by spinning the needle with a duty cycle, provided the angle of rotation is controlled such that the bevel stops in the same orientation during each ‘stop’ portion of the cycle. • Longer ‘stop’ intervals create steeper curvature of the needle, and longer ‘spin’ intervals create a straighter trajectory.
An example A simulated needle-tissue arrangement with different targets. In A, the needle is at the edge of the target (a bottle cap with a lesion). In B, it is steered straight towards the opposite wall. In C, it reaches a target taking a right curve. In D, it reaches a target taking a left curve.
Incorporating Uncertainties • The uncertainties in the needle position are handled using a Markov Decision Process, which helps in finding a stochastic path from a start position to a target, subject to user-specified “cost” parameters for direction changes, insertion distance, and obstacle collisions. • Markov decision processes (MDPs), provide a mathematical framework for modelling decision-making in situations where outcomes are partly random and partly under the control of the decision maker. More precisely a Markov Decision Process is a discrete time stochastic control process characterized by a set of states; in each state there are several actions from which the decision maker must choose. For a state s and an action a, a state transition function Pa(s) determines the transition probabilities to the next state. The decision maker earns a reward for each state transition. The state transitions of an MDP possess the Markov property: given the state of the MDP at time t is known, transition probabilities to the state at time t + 1 are independent of all previous states or actions. • Hence MDPs are aptly suited for guiding the needle in the soft tissues.
Optimizing Results • Dynamic Programming is used to optimize the path planning of the needle. 1st approach: Computing Deterministic Shortest Path 2nd approach: Maximizing the probability of success • Shortest Path Approach 2. Maximizing probability of success • Note: The first approach is risky as it passes through the obstacles. However, the second approach avoids the obstacles, but since it takes a longer path, the number of actuations needed increases.
Optimizing Results • Parameters used as inputs for the motion planner: • σi : Standard deviation of needle tip deflections that can occur during insertion. • σr : Standard deviation of needle tip deflections that can occur during direction changes. • Angle of insertion of the needle, bevel angle of the needle and the initial sense of rotation of the needle. • User-defined probability of success
References • J. A. Engh, G. Podnar, D. Kondziolka, and C. N. Riveire. “Toward effective needle steering in brain tissue”, 28th IEEE EMBS Annual International Conf., 2006. • G. S. Chirkjian, A. M. Okamura. “ Steering flexible needles under Markov Motion Uncertainty”, IEEE intl. conf. on Intelligent Robots and Systems (IROS), Aug 2005. • D. Glozman and M. Shoham.” Flexible needle steering and optimal trajectory for percutaneous therapies”, MICCAI 2004, LNCS 3217. • R. J. Webster, N. J. Cowan, G. Chirkjian and A. M. Okamura, “ Nonholonomic modelling of needle steering”, Experimental Robotics IX, STAR 21, pp. 35-44, 2006.