Download
1 / 1
10 likes | 142 Vues
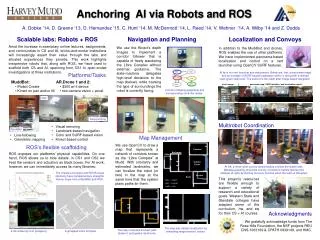
Anchoring AI via Robots and ROS. A. Dobke ’ 14, D. Greene ‘ 13, D. Hernandez '15, C. Hunt ‘ 14, M. McDermott ‘ 14 , L. Reed '14, V. Wehner '14, A. Wilby '14 and Z. Dodds. Scalable labs: Robots + ROS. Navigation and Planning. Localization and Convoys.

E N D
Anchoring AI via Robots and ROS A. Dobke ’14, D. Greene ‘13, D. Hernandez '15, C. Hunt ‘14, M. McDermott ‘14, L. Reed '14, V. Wehner '14, A. Wilby '14 and Z. Dodds Scalable labs: Robots + ROS Navigation and Planning Localization and Convoys Amid the increase in exemplary online lectures, assignments, and communities in CS and AI, bricks-and-mortar institutions will increasingly assert their value through the labs and situated experiences they provide. This work highlights inexpensive robots that, along with ROS, we have used to scaffold both CS and AI, spanning from CS1 to open-ended investigations at three institutions. We use the Kinect's depth images to implement a corridor follower that is capable of freely wandering the Libra Complex without external guidance. The state-machine delegates high-level decisions to the map (below), while tracking the type of surroundings the robot is currently facing. In addition to the Muddbot and drones, ROS enables the use of other platforms. We have implemented panorama-based localization and control on a nerf launcher using OpenCV SURF features. At tip is our nerf launcher and webcamera. Below are, first, a panorama maps and an example of SURF-based localization within it, along with a desired view (green diamond). The second is the result after image-based navigation. Platforms/Tasks • MuddBot: • iRobot Create • Kinect on pan and/or tilt • AR.Drone 1 and 2: • $300 wi-fi device • two-camera vision + accel. novel image panorama map, SURF matches, and localization result Corridor-following snapshots and corresponding controller states. flips Corridor-following hoop-jumping Multirobot Coordination • Visual servoing • Landmark-based navigation • Color and SURF-based vision • Kinect-based control MuddBot • Line-following • Odometric mapping Map Management We use OpenCV to draw a map that represents a network of corridors known as the “Libra Complex” at Mudd. With odometry and estimated landmarks, we can localize the robot (or two) in the map at the same time that the system plans paths for them. ROS’s flexible scaffolding Parsons Beckman • ROS exposes our platforms’ physical capabilities. On one hand, ROS allows us to hide details: in CS1 and CS2 we treat the sensors and actuators as black boxes. For AI work, however, we can immediately access its many libraries: Olin Galileo Foyer At left, a three-robot convoy demonstrates a follow-the-leader task. Message-passing allows the convoy of robots to handle failures (the obstacle at right) by starting recovery routines when the team is disrupted. The Create’s encoders and FOVIS visual odometry have complementary strengths. Below, maps from a MuddBot and ROS. Jacobs Keck This project’s resources are fleixble enough to support a variety of research and educational goals. Western State and Glendale colleges have adapted some of the curriculum, hw, and sw for their CS + AI courses. blue ~ carpet gray ~ cement white ~ tile Acknowledgments We gratefully acknowledge funds from The Rose Hills Foundation, the NSF projects REU CNS-1063169 & CPATH 0939149, and HMC. The map also assists localization by simulating range sensors’ values. The map computes the best path, shows it, and guides robot turns. a 3d rendering from gmapping A gmapped Libra Complex