Disco duro
Disco duro. John William Marin. Definición.


Disco duro
E N D
Presentation Transcript
Disco duro John William Marin
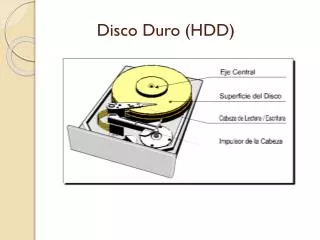
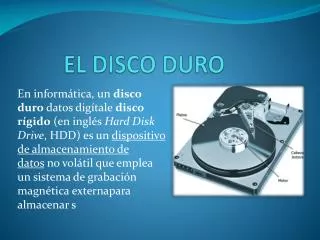
Definición es un dispositivo de almacenamiento de datos no volátil que emplea un sistema de grabación magnética para almacenar datos digitales. Se compone de uno o más platos o discos rígidos, unidos por un mismo eje que gira a gran velocidad dentro de una caja metálica sellada. Sobre cada plato se sitúa un cabezal de lectura/escritura que flota sobre una delgada lámina de aire generada por la rotación de los discos.
Historia El primer disco duro fue inventado por IBM en 1956. A lo largo de los años, los discos duros han disminuido su precio al mismo tiempo que han multiplicado su capacidad, siendo la principal opción de almacenamiento secundario para PC desde su aparición en los años 60. Los discos duros han mantenido su posición dominante gracias a los constantes incrementos en la densidad de grabación, que se ha mantenido a la par de las necesidades de almacenamiento secundario El primer disco duro, aparecido en 1956, fue el IBM 350 modelo 1, presentado con la computadora Ramac I: pesaba una tonelada y su capacidad era de 5 MB. Más grande que una nevera actual, este disco duro trabajaba todavía con válvulas de vacío y requería una consola separada para su manejo Antiguo disco duro de IBM (modelo 62PC, «Piccolo»), de 64,5 MB, fabricado en 1979
Existe otro tipo de almacenamiento que recibe el nombre de Unidades de estado sólido; aunque tienen el mismo uso y emplean las mismas interfaces, no están formadas por discos mecánicos, sino por memorias de circuitos integrados para almacenar la información. El uso de esta clase de dispositivos anteriormente se limitaba a las supercomputadoras, por su elevado precio, aunque hoy en día ya son muchísimo más asequibles para el mercado doméstico
1.1 componentes LOS BRAZOS Y CABEZAS DE LECTURA/ESCRITURA Podemos observar además que hay un brazo metálico, cuyo extremo reposa sobre la superficie de los platos. Se trata del brazo que soporta las cabezas de Lectura/escritura. En la figura podemos observar los brazos de una unidad de dos platos. En este caso, en el extremo del brazo se encuentran cuatro cabezas. Por cada cara de cada plato de una unidad, hay por lo menos una cabeza de lectura/escritura. Es decir que los platos son utilizados de ambas caras.
las unidades de disco son muy frágiles, y deben ser siempre manejadas con mucho cuidado. Cuando se pone la unidad a trabajar, los platos comienzan a girar velozmente, arrastrando el aire atrapado dentro de la burbuja. Entonces las cabezas comienzan a volar sobre un colchón de aire, por cierto muy delgado, que se forma sobre cada cara de cada plato. Gracias a esto, el conjunto de cabezas puede volar sobre la superficie de los platos. Este colchón es tan delgado, que anda en el orden de una décima de milímetro. Cualquier impureza, como una partícula de carbón de hollín del aire que respiramos diariamente, puede provocar un daño severo en la superficie del plato y de la cabeza Esto explica por que las cabezas, los platos y sus mecanismos asociados, están encerrados en una burbuja hermética; y también por que nunca debemos abrir una unidad. Hacerlo permitiría el ingreso de aire contaminado dentro de la unidad, provocando daños irreversibles en la superficie magnética de los platos y en las cabezas.
1.2 LOS MOTORES dos motores: uno para el movimiento de rotación de los platos, y otro para el desplazamiento del conjunto de las cabezas. se puede observar desmontado al motor y eje de los platos de una unidad de disco rígido. Este es un motor sincrónico, controlado por los circuitos de la placa electrónica montada sobre la unidad El conector y los cables quedan del lado externo, conectados a la placa electrónica. Del lado interno queda el eje del motor, donde se atornillan los platos.
Y El motor de las cabezas Se trata de los motores de desplazamiento lineal, controlados electrónicamente. El principio de funcionamiento del motor es muy sencillo y elemental: funciona como un parlante. Una bobina se desplaza por el campo magnético fijo de un imán, en respuesta a la energía eléctrica que recibe de un circuito electrónico. La complejidad radica en la tecnología necesaria para lograr que ese movimiento pueda ser controlado
En la figura, se ha desmontado el imán, dejando al descubierto la bobina (voicecoil), para poder apreciar la sencillez interna del motor lineal.
1.3 PLACA ELECTRÓNICA DE CONTROL Todos los componentes internos que hemos visto, dependen de la placa electrónica, para coordinar sus funciones. El motor de rotación por ejemplo, debe girar a una velocidad fija y constante. Los discos modernos de alta velocidad hacen girar sus platos a más de 10.000 revoluciones por minuto. El circuito electrónico que controla y corrige la velocidad de rotación, reside en la placa electrónica de control El motor lineal y su compleja electrónica de control de posicionamiento, también residen en la placa electrónica. Además allí reside tanto la lógica necesaria para la activación de una cabeza del conjunto, como la amplificación y descodificación de datos; la interfaz con el Motherboard, etc.
1.4 ALMACENAMIENTO Y ORGANIZACIÓN DE DATOS La información que se almacena en un disco rígido, se graba de modo tal que sea posible el acceso veloz a las zonas vacantes de su estructura, y que posteriormente sea sencilla su recuperación. Para lograr este objetivo, la información se almacena con la siguiente organización: Pistas, Cilindros y Sectores
1.4.1 LAS PISTAS Las cabezas de lectura/escritura se desplazan por la superficie ferromagnética de los platos, gracias al motor de las cabezas. Este último, ubica a las cabezas en distintas posiciones con respecto al eje de rotación. En cada una de estas posiciones de descanso, las cabezas pueden grabar o leer datos de la superficie de los platos, completando una vuelta completa. Es decir, que si pudiéramos ver la información que queda grabada en los platos de los discos, veríamos que forma pistas circulares concéntricas. Para ilustrar esto, a un plato de un disco rígido se trazaron las pistas (imaginarias) con un marcador, En realidad, en la ilustración, sólo se trazaron algunas, ya que un disco actual usa más de cinco mil pistas en cada cara de cada plato
1.4.2 LOS SECTORES Para organizar mejor aún la información, cada pista no se graba íntegra de una vez, sino que se graba de a tramos, conocidos como sectores. Desde el diseño de la primer PC con disco rígido, hasta la actualidad, se ha normalizado el uso de sectores con capacidad de 512 Bytes Si analizamos un poco el aprovechamiento de la superficie de la figura, vemos que los sectores de las pistas cercanas al eje del disco, tienen menor tamaño que los sectores de la periferia
Si cualquier sector posee una capacidad de almacenamiento de 512 bytes, ello significa que los 512 bytes en un sector cercano a la periferia del disco entrarán holgados, y que en los sectores cercanos al eje, entrarán apretados En la figura se ilustra esto con dos rectángulos que contienen la misma cantidad de datos. El superior representa a un sector cercano al borde del disco, mientras que el inferior (de menor tamaño), representa un sector cercano al eje.
La conclusión es sencilla: Si se puede lograr mayor densidad de grabación en las pistas cercanas al eje, en las pistas cercanas al borde se está desperdiciando espacio. La solución utilizada en la fabricación de las unidades modernas, es la siguiente: Emplear la misma densidad de grabación en todos los sectores del disco, es decir que todos los sectores sean del mismo tamaño y tan pequeños como sea posible En este ejemplo, las pistas internas se fraccionan en nueve sectores, mientras que las pistas externas se fraccionan en dieciséis
1.4.3 LOS CILINDROS: UN CONCEPTO ABSTRACTO las cabezas del brazo, están verticalmente alineadas. Esto implica que a determinada distancia del eje, una pista grabada por cualquier cabeza, estará a la misma distancia del eje que las pistas grabadas por cualquier otra cabeza del brazo. pensemos en la unión mental de todas las pistas grabadas, por todas las cabezas de un brazo a determinada distancia del eje. Formaremos así un cilindro Mover las cabezas de un cilindro a otro, significa poner en marcha al motor correspondiente, vencer la inercia de los brazos que las soportan, esperar el tiempo de viaje, estabilizar los brazos en la nueva posición, y recién allí poder comenzar la búsqueda de información. Esto implica que el viaje de las cabezas provoca una pérdida importante de tiempo. La menor demora será entre cilindros consecutivos, y la mayor entre cilindros distantes. Este problema se hace más evidente, cuando la información no queda almacenada en forma contigua, es decir que se encuentra fragmentada
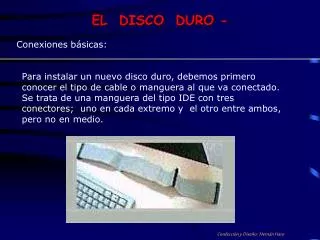
2. Tipos de conexión Si hablamos de disco duro podemos citar los distintos tipos de conexión que poseen los mismos con la placa base, es decir pueden ser SATA, IDE, SCSI o SAS: 2.1 IDE IntegratedDeviceElectronics ("Dispositivo con electrónica integrada") o ATA (AdvancedTechnologyAttachment), controla los dispositivos de almacenamiento masivo de datos, como los discos duros y ATAPI (AdvancedTechnologyAttachmentPacket Interface) Hasta aproximadamente el 2004, el estándar principal por su versatilidad y asequibilidad. Son planos, anchos y alargados.
LOS JUMPERS EN UN DISCO DURO IDE La configuración de los jumpers en una unidad IDE es algo de suma importancia, ya que es la única forma que tiene el sistema de saber qué orden le hemos dado a estos dispositivos, y en consecuencia, en qué orden debe acceder a ellos e indirectamente desde cual efectuar el arranque del sistema. Debemos tener siempre presente que en un puerto IDE tan sólo pueden estar conectados uno o dos dispositivos, de los que sólo uno puede ser Master (Maestro), teniendo obligatoriamente que estar configurado el otro como Slave (Esclavo). El incumplimiento de esta norma provoca que el sistema no pueda acceder a los dispositivos y, por lo tanto, éstos no funcionen, pudiendo incluso provocar que el propio sistema deje de funcionar.
2.2 SCSI Son interfaces preparadas para discos duros de gran capacidad de almacenamiento y velocidad de rotación. Se presentan bajo tres especificaciones: SCSI Estándar (Standard SCSI), SCSI Rápido (Fast SCSI) y SCSI Ancho-Rápido (Fast-Wide SCSI). Su tiempo medio de acceso puede llegar a 7 milisegundos y su velocidad de transmisión secuencial de información puede alcanzar teóricamente los 5 Mbps en los discos SCSI Estándares, los 10 Mbps en los discos SCSI Rápidos y los 20 Mbps en los discos SCSI Anchos-Rápidos (SCSI-2). Un controlador SCSI puede manejar hasta 7 discos duros SCSI (o 7 periféricos SCSI) con conexión tipo margarita (daisy-chain). A diferencia de los discos IDE, pueden trabajar asincrónicamente con relación al microprocesador, lo que posibilita una mayor velocidad de transferencia.
2.3 SATA (Serial ATA): El más novedoso de los estándares de conexión, utiliza un bus serie para la transmisión de datos. Notablemente más rápido y eficiente que IDE. Existen tres versiones, SATA 1 con velocidad de transferencia de hasta 150 MB/s (hoy día descatalogado), SATA 2 de hasta 300 MB/s, el más extendido en la actualidad; y por último SATA 3 de hasta 600 MB/s el cual se está empezando a hacer hueco en el mercado. Físicamente es mucho más pequeño y cómodo que los IDE, además de permitir conexión en caliente.
2.4 SAS (Serial Attached SCSI): Interfaz de transferencia de datos en serie, sucesor del SCSI paralelo, aunque sigue utilizando comandos SCSI para interaccionar con los dispositivos SAS. Aumenta la velocidad y permite la conexión y desconexión en caliente. Una de las principales características es que aumenta la velocidad de transferencia al aumentar el número de dispositivos conectados, es decir, puede gestionar una tasa de transferencia constante para cada dispositivo conectado, además de terminar con la limitación de 16 dispositivos existente en SCSI, es por ello que se vaticina que la tecnología SAS irá reemplazando a su predecesora SCSI. Además, el conector es el mismo que en la interfaz SATA y permite utilizar estos discos duros, para aplicaciones con menos necesidad de velocidad, ahorrando costes. Por lo tanto, las unidades SATA pueden ser utilizadas por controladoras SAS pero no a la inversa, una controladora SATA no reconoce discos SAS.