Download
1 / 31
420 likes | 829 Vues
Doppler Estimation and Correction for Shallow Underwater Acoustic Communications. Kenneth A. Perrine*, Karl F. Nieman*, Terry Henderson*, Keith Lent*, Terry J. Brudner*, and Brian L. Evans † *Applied Research Laboratories: The University of Texas at Austin

E N D
Doppler Estimation and Correction for Shallow Underwater Acoustic Communications Kenneth A. Perrine*, Karl F. Nieman*, Terry Henderson*, Keith Lent*, Terry J. Brudner*, and Brian L. Evans† *Applied Research Laboratories: The University of Texas at Austin †Dept. of Electrical & Computer Eng., University of Texas at Austin Asilomar Conference on Signals, Systems, and Computers Nov. 9, 2010
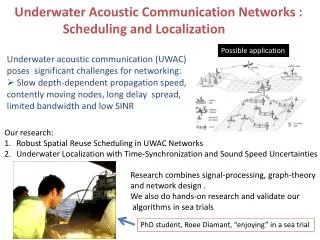
Underwater Acoustic Network Buoys Access Point Divers Users Seafloor Datalink UUVs
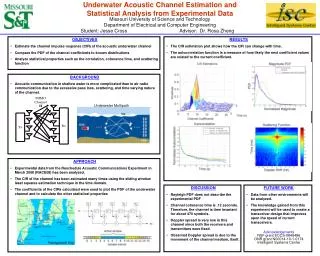
Underwater Acoustic Channel • Propagation speed 200,000x slower vs. RF in air • Lowpass (bandwidth decreases with range) • Wideband communication relative to carrier • Shallow water case • Time-varying Doppler • Channel reverberation High energy Long time constant Measured shallow water channel impulse responsesRange is 30m for position 1 and 1260m for position 3.
Underwater Acoustic Channel • Doppler effects for received QPSK signal • Results from linear bulk Doppler correction Decision regions
Proposed Contributions • Shallow underwater acoustic communications • One-element transmitter (stationary and moving cases) • Quadrature phase shift keying (QPSK) • Carrier frequency 62.5 kHz and 31.25 kHz bandwidth • Transmit 31.25 kbps at distances of 30 to 1285 m • One-element receiver (anchored on floating platform) • Evaluate SNR performance of three Doppler estimation methods • Evaluate static and adaptive equalizers
Bulk Doppler Estimation • Approach 1: Self-referenced correlation • Transmit two copies of training sequence • Use phase in cross-correlation of received symbols Symbols Rep. 1 Rep. 2 Payload… Calculate phase offset in decoded symbols P. Moose, “A technique for orthogonal frequency division multiplexing frequency offset correction,”IEEE Transactions on Communications, vol. 42, no. 10, pp. 2908-2914, Oct. 1994
Bulk Doppler Estimation • Approach 2: Carrier recovery • Observe peak FFTfrequency of squaredsamples (in binaryphase shift keying(BPSK) case) • Compare observedfrequency withexpected centerfrequency (withoutDoppler)
Bulk Doppler Estimation • Approach 2: Carrier recovery • Variation: slice packet into “windows” • Rough adaptation to time-varying Doppler effects
Bulk Doppler Estimation • Approach 3: Pilot tone • Encode pure tone outside of data band • Average over all measured pilot frequencies to estimate deviation from transmitted frequencies 87 kHz tone +/- Doppler Data: 62.5 kHz center; 31.25 kHz BW
Bulk Doppler Estimation • Approach 3: Pilot tone • Variation: slice packet into “windows”: 87 kHz tone +/- Doppler Data: 62.5 kHz center; 31.25 kHz BW
Windowing Tradeoffs • QPSK decoding 250 ms 125 ms each 62.5 ms each 31.25 ms each
Packet Structure • Linear frequency modulated (LFM) chirp • Resistant to Doppler • Training – 128 symbols • 4 length-13 Barker sequences • 76 symbols for equalizer training • Symbol rate of 15.625 kHz • Payload – 3968 symbols • Guard interval at end • 100 ms for reverberation analysis • Pilot tones at 45 and 87 kHz Packet Structure Packet Spectrum
Experimental Setup • Applied Research Laboratories Lake Travis Test Facility • Lake 37 m depth Former riverbed Nearby dam • Transmitter on research vessel • Receiver on barge at test station
Data Collection Points 1: 15mdocked 2: 325-375mfloating 3: 1235-1285mfloating 4: 185-255mvertical motion 5: 300-80mtowing at ~3 kts
Static Equalizer Decision Feedforward taps Σ x[m] y[m] 5 feedforward taps3 feedback taps Feedback taps
Fully Adaptive Equalizer Decision Feedforward taps Σ x[m] y[m] – Update 5 feedforward taps3 feedback taps0.01 learning rate Feedback taps Update: O(N) per symbol (N = total # of taps)
Issues with Windowing • Support for Doppler estimation accuracy decreased • Smaller samples are subject to more noise • Discontinuities (even when smoothed) can lead the adaptive decision feedback equalizer (DFE) astray • Windowing mostly benefits static equalizer Successful operation Problematic
Experimental Results • Average estimated SNR for bulk Doppler detection/correction and equalization • Carrier recovery (BCDE) provides highest SNR. • Adaptive equalizer has best increase in SNR overall A: Self-referenced correlation B, C, D, E: Carrier recovery (1, 2, 4, 8 windows) F, G, H, I: Pilot tone (1, 2, 4, 8 windows) Bulk Doppler Detection Method
Experimental Results • Self-referenced correlation (A) performs poorly • Represents tiny packet sample • Pilot tone tracking (FGHI) performs poorly in motion case (Pos. 2) • Carrier recovery with any number of windows (BCDE) performs best
Σ – Update Conclusions • Windowing for Doppler detection benefits static equalization • Pilot tone method was not reliable • Best configuration over entire dataset • Single window carrier recovery method • Adaptive equalization
Underwater Acoustic Comm. Dataset • Experimental Setup • 1-element transmitter • BPSK, QPSK, 4-QAM, 16-QAM and 256-QAM • Symbol rates of 3.9 and 15.6 kHz • With and without pilot tones • Ranges 10m to 1285 m • 5-element receiver array in L shape • Raw data in MATLAB format http://users.ece.utexas.edu/~bevans/projects/underwater/datasets/index.html
Publications and Presentations Conferece Proceedings K. F. Nieman, K. A. Perrine, T. L. Henderson, K. H. Lent, T. J. Brudner and B. L. Evans, “Wideband Monopulse Spatial Filtering for Large Array Receivers for Reverberant Underwater Communication Channels”, Proc. IEEE OCEANS, Sep. 20-23, 2010 Seattle, WA K. F. Nieman, K. A. Perrine, K. H. Lent, T. L. Henderson, T. J. Brudner and B. L. Evans, “Multi-stage And Sparse Equalizer Design For Communication Systems In Reverberant Underwater Channels”, Proc. IEEE Int. Workshop on Signal Processing Systems, Oct. 6-8, 2010, Cupertino, CA K. A. Perrine, K. F. Nieman, T. L. Henderson, K. H. Lent, T. J. Brudner and B. L. Evans, “Doppler Estimation and Correction for Shallow Underwater Acoustic Communications”, Proc. Asilomar Conf. on Signals, Systems, and Computers, Nov. 7-10, 2010, Pacific Grove, CA Released Dataset “The University of Texas at Austin Applied Research Laboratories Nov. 2009 Five-Element Acoustic Underwater Dataset”, Version 1.0, 6-4-2010 5-element samples of BPSK, QPSK, 16QAM, 64QAM, and 256QAM signals Up to 1300 yard range, up to 63 kbit/sec data rate
Data Collection • Transmitter • Omnidirectional transducer • Submerged between 1-8m • Receiver • 4.6m depth • Five directional hydrophones • Half-power beamwidths • Horizontal: ~45° • Vertical: ~10° • Sampling rate: 500 kHz Transmitting Transducer Sensitivity at 1m
Software Receiver • Frame synchronizer • Identify LFM chirps via cross-correlation • Bulk Doppler detection • Bulk Doppler correction • Linear interpolation of oversampled basebanded signal • Decision feedback equalizer (DFE) • Static • Decision-directed adaptive w/ learning rate of 0.01
July Raytracing Surface • Severe thermocline: • Receiver R can’t directly see transmitters A or B Lakebed
Channel Impulse Response Fig. 4. Channel impulse responses (CIR) for near and far ranges. Position 1 range is 30 m and Position 3 range is ~1260 m.
Experimental Results A: Self-referenced correlation B, C, D, E: Carrier recovery (1, 2, 4, 8 windows) F, G, H, I: Pilot tone (1, 2, 4, 8 windows) Pos. 1: 15m, docked Pos. 2: 325-375m,free floating
Experimental Results A: Self-referenced correlation B, C, D, E: Carrier recovery (1, 2, 4, 8 windows) F, G, H, I: Pilot tone (1, 2, 4, 8 windows) Pos. 4: 185-255m,vertical motion Pos. 5: 300-80m,towing at ~3kts
Experimental Results • A BER of ~0.5 indicates catastrophic failure in decoding. • 4 or 8 windows significantly helps the static EQ; • However, adaptive EQ yields better results overall.
Experimental Results • Pilot tone approach was not be reliable • Multipath interference caused selective fading • Pilot tone was too narrow in bandwidth