Statics
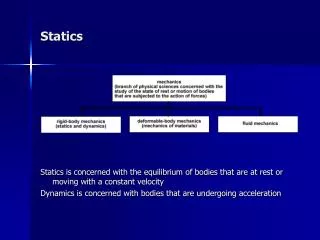
Statics. Chapter 1. Introduction to Statics. What is Statics?. Statics is the study of systems in which the motion of the object is not changing (no acceleration) Static – Not Changing Equilibrium – No net force, zero acceleration. 0. What is systems is Statics used to describe or analyze?.

Statics
E N D
Presentation Transcript
Chapter 1 Introduction to Statics
What is Statics? • Statics is the study of systems in which the motion of the object is not changing (no acceleration) • Static – Not Changing • Equilibrium – No net force, zero acceleration 0 What is systems is Statics used to describe or analyze? Structures – bridges, buildings, frames, etc. Machines – robots, vehicles, etc. Material Properties – Stress, Strain, Strength, breakage, vibrations, etc.
Terminology • Space – geometric region occupied by a body. Described using linear and angular measurements. • 1D – 1 linear component • 2D – 2 linear components or 1 linear and 1 angular component • 3D – 3 linear components or 2 linear and 1 angular component or 1 linear and 2 angular components • Time – Measure of successive events (not applicable to Statics) • Mass – Inertia of an object – Resistance to changing motion. • Force – Interaction between two objects. Defined by magnitude, direction and point of application. • Particle – Object of negligible (or irrelevant) dimensions. Mass is concentrated at a single point (center of mass). • Rigid Body – An object that does not change shape under the application of a force. • Depends on material and how the force is applied • Deformation is beyond the scope of this course
Scalars and Vectors • Scalar – quantity that only has magnitude. ( or V or V) • Mass, time, density volume • Vector – quantity that has magnitude and direction. ( or V) • Velocity, acceleration, force, area l q Vectors can be added using parallelogram method (Fig. 1/2 (b)) or head to tail method (Fig. 1/2 (c))
Vector Components Vectors can be broken up into components. Components are used to describe part of the vector along each of the coordinate directions for your chosen coordinate system. - The number of components is determined by the number of dimensions. A 2D vector in the x-y plane has 2 components - 1 in the x direction and 1 in the y direction. A 3D vector in spherical coordinates has 3 components - 1 in the r direction, 1 in the q direction and 1 in the f direction. - All vector components are defined to be orthogonal (perpendicular) to each other. - Vector components are also vector quantities. Vectors can be moved as long as their length and orientation do not change! y These are only valid for the specified angle. When you square a vector, the result is a square of the magnitude. Directional information is removed. q x
You can determine magnitude and direction for 3D vectors in a similar fashion to what was done for 2D. The magnitude can be found using the Pythagorean Theorem. qx, qy and qz are the angles measured between the vector and the specified coordinate direction.
Vector notation using unit vectors A unit vector is a dimensionless vector with a magnitude of 1 that is used to describe direction. Cartesian coordinate unit vectors: The following notation is also used: x – direction = y – direction = z – direction = x – direction = y – direction = z – direction = - The hat ‘^’ is used to distinguish unit vectors from other vectors. Examples of vectors using unit vector notation: Ax = magnitude of A along x – direction Ay = magnitude of A along y – direction Az = magnitude of A along z – direction Unit vectors can also be defined for any non-standard coordinate direction. - Unit vector along direction of in terms of the coordinates of . +
Dot Product (Scalar Product) This product of two vectors results in a scalar quantity. You multiply one vector by the component of the second vector that is parallel to the first vector. If A = B: We use the same rules when multiplying a vector by itself. The square of a vector only gives magnitude. Pythagorean Theorem!
Example: You have two vectors and . • What are the coordinates of the resultant vector? • What is the magnitude of the resultant? • What is the direction of the resultant? a) b) Vx = Vcosqx Vy = Vcosqy Vz = Vcosqz c)
Newton’s Laws • A Particle remains at rest or continues to move with uniform velocity (straight line, constant speed) if there is no net force acting on it. • Inertia • The acceleration of a particle is proportional to the vector sum of forces acting on it, and is in the direction of this vector sum. • One object • The forces of action and reaction between interacting bodies are equal in magnitude, opposite in direction and colinear (lie on the same line). • Two different objects, force one object exerts on the other! Units • Contains information regarding the meaning of a number. Nearly all numerical values will have a unit. • Two systems of units • English or U.S. Customary units (lb, ft, sec) (FPS) • SI units (m, kg, s) (MKS) • You must be able to convert between unit in a single system as well as between systems!