RADON TRANSFORM
RADON TRANSFORM. A small introduction to RT, its inversion and applications Jaromír Brum Kukal, 2009 . Johann Karl August Radon. Born in D ěčí n (Austrian monarchy, now North Bohemia , CZ ) in 1887 Austrian mathematician living in Vienna

RADON TRANSFORM
E N D
Presentation Transcript
RADON TRANSFORM A small introduction to RT, its inversion and applications Jaromír Brum Kukal, 2009
Johann Karl August Radon • Born in Děčín (Austrian monarchy, now North Bohemia, CZ) in 1887 • Austrian mathematician living in Vienna • Discover the transform and its inversion in 1917 as pure theoretical result • No practical applications during his life • Died in 1956 in Vienna
Actual applications of inverse Radon transform • CT – Computer Tomography • MRI – Magnetic Resonance Imaging • PET – Positron Emission Tomography • SPECT – Single Photon Emission Computer Tomography
Geometry of 2D Radon transform • Input space coordinatesx, y • Input function f(x, y) • Output space coordinatesa, s • Output function F(a, s)
Formulas of pure RT and IRT Radon transform Inverse Radon transform
Radon transform properties • Image of any f + g is F + G • Image of cf is cF for any real c • Rotation of f causes translation of F in α • Scaling of f in (x,y) causes scaling of F in s • Image of a point (2D Dirac function) is sine wave line
Radon transform properties 6. Image of n points is a set ofn sine wave lines 7. Image of a line is a point (2D Dirac function) 8. Image of polygon contour is a point set
Radon transform realization • Space domain: • Pixel splitting into four subpixels • 2D interpolation in space domain • 1D numeric integration along lines • Frequency domain: • 2D FFT of original • Resampling to polar coordinates • 2D interpolation in frequency domain • Inverse 2D FFT brings result
Inverse transform realization • Filtered back projection in space domain: • 1D HF filtering of 2D original along s • Additional 1D LF filtering along s • 2D interpolation in space domain • 1D integration along lines brings result • Frequency domain: • 2D FFT of original • Resampling to rectangular coordinates • 2D interpolation in frequency domain • 2D LF filtering in frequency domain • Inverse 2D FFT brings result
RT and IRT in Matlab • Original as a square matrix D(2n2n) • of nonnegative numbers • Vector of angles alpha • Basic rangealpha = 0:179 • Digital range is better • alpha = (0:2^N -1)*180/2^N • Extended rangealpha = 0:359 • Output matrix R of nonnegative numbers • Angles alpha generates columns of R • R = radon(D,alpha); • D = iradon(R,alpha); • D = iradon(R,alpha,metint,metfil);
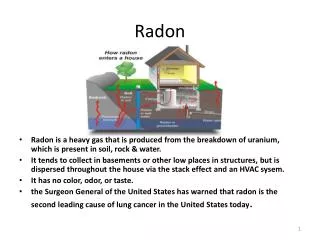
Radon transform applications Natural transform as result of measurement: Gamma ray decay from local density map Extinction from local concentration map Total radioactivity from local concentration map Total echo from local nuclei concentration map 3D reality is investigated via 2D slices Artificial realization: Noise – RT – noise – IRT simulations Image decryption as a fun TSR invariant recognition of objects