Download
1 / 50
500 likes | 681 Vues
Examples of practical applications of BASIC Stamp controller. Some applications of the BASIC Stamp controller. …. Chalmers University of Technology, Sweden - lab robot camera- you can see whats happening in their laboratory over the web. http://mac5.pe.chalmers.se

E N D
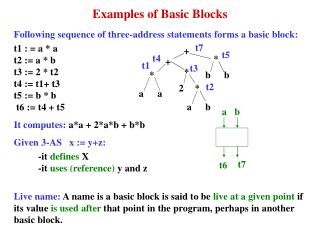
Examples of practical applications of BASIC Stamp controller
Some applications of the BASIC Stamp controller • …. • Chalmers University of Technology, Sweden - lab robot camera- you can see whats happening in their laboratory over the web. http://mac5.pe.chalmers.se • Hugh MacMillan Rehabilitation Centre, Toronto, Ontario, Canada, has a project using the STAMP to control an artificial hand for young amputees
Stamp Interfacing • A Robotic bug built by Greg Birdsall and Fred Richards for the X-files uses a BASIC Stamp controller
The Pocket-Bot Robot platform • This miniature robotic vehicle has independent four wheel drive and bumper sensors. • Kits are also available for sensing heat or light and for following a line. http://www.divent.com/pocketbot.html
Stamp Interfacing Example of Stamp Interfacing • Corky'z Robotz- an IR Controlled robotic toy. http://www.geocities.com/ SiliconValley/Park/1302/robotz.htm • Corky'z Robotz- an IR Controlled robotic toy. http://www.geocities.com/ SiliconValley/Park/1302/robotz.htm
Stamp Interfacing Example of Stamp Interfacing A Digital Weather Station using wind direction, wind speed, temperature, humidity and rain gauge sensors. http://oeonline.com/~tparnell
Emminence Airship Project Purpose of this Project: • A fun and exciting learning opportunity Practical Applications • Advertising • Scientific Research • Military and Police • Telecommunications
Physical Design of the Airship • One or more spherical balloons • A plastic gondola to house the electrical equipment • Helium used to fill the balloons
How it Works • User gives commands through a PC keyboard • These commands are relayed through the RF transceivers to the blimp • The blimps on-board intelligence interprets the commands and performs the corresponding functions
The Ground to Air Transmission • The Basic Stamp II gives the transmitter the appropriate bit pattern • The On-Board Stamp then receives the bit pattern from the receiver • Based on the bit pattern received, the Stamp will set the appropriate bits high or low
The On-Board Stamp is interfaced with the motor driver circuit • Propeller motors are used • There is an enable and a fwd/bwd signal for each motor The Motors
Onboard System • Subsystems controlled by CPU GPS Video Compass Motion Control Processor Motion Control Circuitry Central Processor
Internet Based Operations • Operator connects to operation station to assume control PC PC Operation Station PC PC
Reusable Software Design • Robot software specification defined according to system capabilities. • Operator software uses robot specification to coordinate data channels. • Central Mission Control Stations allow for control of robots around the world.
DataTurbine Developer API • Data sources are coordinated and mapped to operator
Robot Software Architecture • Built on Windows OS • Developers API for data transmission with TCP/IP • Interface for operator received controls • Autonomous mission platform Autonomy Application Coordination Application Data Turbine Operating System
OperatorSoftware Architecture • Built on Windows OS • Developers API for data transmission with TCP/IP • Operator communication and control specification • Interface for control devices • Interface for data output Input App Output App Client Core Specification DataTurbine Operatirng System
Future Features • Internet control capabilities • A possible GUI • A joystick or some other device • GPS on-board the blimp • A digital compass on-board • The ability for positional commands • An on-board camera • A possible collaboration with RoverWerx
Future Missions • Autonomous missions with other Intelligent Robots
Reminder • Serial Communication (RS-232) • principles • Configuration • Transmission • Programming • MIDI • Characteristics • Transmission • Definitions • Standards • Programming
Serial Comunicacation • Bit by bit • Asynchronous • Serial Protocol for RS-232 (RS-432, MIDI...) • (0 logic [+3,+25V] and 1 logic [-3,-25V]) RS 232C • 110 to 256.000 bauds • Connector with 9 pins, 3 used. • Transmit Data (TXD) pin 3 in DB9 • Receive Data (RXD) pin 2 in DB9 • Ground (SG) pin 5 in DB9 • cables that switch 2 and 3
RS-232 transmission • UART (Universal Asynchronous Receiver/Transmitter) • Parity bits, etc, check it in your documentation. RS-232 Programming COM Ports • In PC • COM 1 3F8 • COM 2 2F8 • COM 3 3E8 • COM 4 2E8
MIDI • Musical Instruments Digital Interface • http://www.midi.org • http://www.harmony-central.com/MIDI/Doc/doc.html
MIDI Transmission • Serial and asynchronous • 31.250 bauds • 1 bit stop and no parity 1 byte = 10 bits • Conector DIN (5 pines, 3 used) and unidirectional cables • Bidirectional communication needs to cables • (MIDI IN y MIDI OUT)
B.STAMP • SEROUT Tpin, Baudmode, ( {#} OutputData ) • SEROUT Tpin {\Fpin}, Baudmode, {Pace,} {Timeout, Tlabel,} [ InputData ] • SEROUT Tpin, Baudmode, 0, [ InputData ] • Program Change en canal 3 0xC2 192+2 = 194 • Note ON in canal 3 0x92 144+2 = 146 • Note OFF in canal 3 0x82 128+2 = 130 • Note DO inf. 60 60-12 = 48 • max speed 127 • SEROUT 15, 60, 0, [194, 73] • SEROUT 15, 60, 0, [146, 48, 127] • PAUSE 2000 • SEROUT 15, 60, 0, [146, 48, 0] • SEROUT 15, 60, 0, [130, 48, 0]
Buchla’s The thunder • BioMuse (Brainwave detector!)
Will be in next projects related to Cyber Theatre Many applications of DSP, speech technologies, sound technologies and microcontroller technologies
Pre-Built Robots Approx. $100 - $200 Contains chassis, motors, wheels and microcontroller (Basic Stamp)
Lego Robotics Kits Easy to prototype Must make your own IR sensors Programming Languages: Logo Not Quite C
Custom Made Mouse Can choose the individual components Can achieve better performance over kits Much more satisfying and fun • Main components: • Microcontroller board • Wall sensors • Motors • Batteries
Propulsion choices DC Motors Servos Stepper Motors • DC Motors • Cheap, small • Need gearbox • Need shaft encoders • H-Bridge • Discrete • SGS Thompson L293D • Can drive two motors • 600mA per motor
Propulsion Servos Need to modify for continuous rotation Need shaft encoders Can be driven without H-Bridge Come with attachments Perfect for Basic Stamp • Stepper Motors • Less torque than DC motors for a given size and weight • Do not need shaft encoders • LSI chips can handle logic and power • Allegro UCN5804LB • 1.25 A • 35 V
Sensors IR Sensors Proximity Easiest to implement Distance Sharp GP2D02 • IR Sensors • Wall Feelers • Wall Feelers • Simple to make and adjust • Tend to get hung up at wall openings
Why use microcontrollers in Sculptures? • To sense and respond to viewer’s actions • To sense and respond to environmental changes • To sequence events • To set up contingencies • To control motion, light, sound
Problems to solve • reverse directions of two motors at particular points in their travel • ensure that the moving arms don’t become and remain synchronized
PIC is used to: • check when the motors have hit their CW and CCW limit switches • reverse the motors’ direction • add a little delay to the time it takes one of the motors to reverse directions in order to prevent synchronization
#include <12c509.h> #use delay(clock=4000000) void main () {set_tris_b(0b001111); //four lines are inputs, two are outputs while (1) { if(input(pin_B0)==0) // if cwLampLimit is touched {output_high(pin_B4);} // activate lampMotorRelay} if(input(pin_B1)==0) // if ccwLampLimit is touched {output_low(pin_B4);} // de-activate lampMotorRelay} if(input(pin_B2)==0) // if cwShieldLimit is touched {output_high(pin_B5); // activate shieldMotorRelay delay_ms(500); } //wait half a second to ensure //non-synchronous movement if(input(pin_B3)==0) // if ccwShieldLimit is touched {output_low(pin_B5);} // de-activate shieldMotorRelay} }}
Sources • Curtis Bahn, RPI • J.E. Wampler • Michael Rodemer, University of Michigan, School of Art and Design • Physics and Media Group, MIT • Josh R. Fairley • Dr. Raymond S. Winton • Mike Haney, University of Illinois • Steve Benkovic, Cal State University , Northridgehttp://homepage.mac.com/SBenkovic • s.benkovic@ieee.org • Franklin Alioto, Christine Beltran, Eric Cina, Vince Francisco, Margo Gaitan, Matthew O’Connor, Mike Rasay. • Kenneth Chin and Prang Chim • Dr. Jim Ostrowski, Bob Miller, Wally Szczesniak, Terry Kientz, • Brett Balogh , Siddharth Deliwala, John Bowen, • Darnel Degand, Kapil Kedia, • Adrian Fox, Christopher Li