Download
1 / 55
550 likes | 568 Vues
Learn about describing rotation, analyzing rigid-body rotation, moment of inertia, torque, work and power for rotating bodies, and angular momentum.

E N D
Learning Goals for Chapter 9 Looking forward at … how to describe the rotation of a rigid body in terms of angular coordinate, angular velocity, and angular acceleration. how to analyze rigid-body rotation when the angular acceleration is constant. the meaning of a body’s moment of inertia about a rotation axis, and how it relates to rotational kinetic energy. how to calculate the moment of inertia of bodies with various shapes, and different rotation axes.
Learning Goals for Chapter 10 Looking forward at … what is meant by the torque produced by a force. how the net torque on a body affects the body’s rotational motion. how to analyze the motion of a body that both rotates and moves as a whole through space. how to solve problems that involve work and power for rotating bodies. how the angular momentum of a body can remain constant even if the body changes shape.
Who invented the idea of rotational mechanics? Jean Burdian (1295? – 1358?, University of Paris) coins the term “impetus” for momentum Thomas Bradwardine (1290? – 1349?, Oxford University) uses “velocitascircuitionas” – angular velocity Rene Descartes (1596 – 1650, University of Franeker) develops “Cartesian” conservation of “motion” – momentum
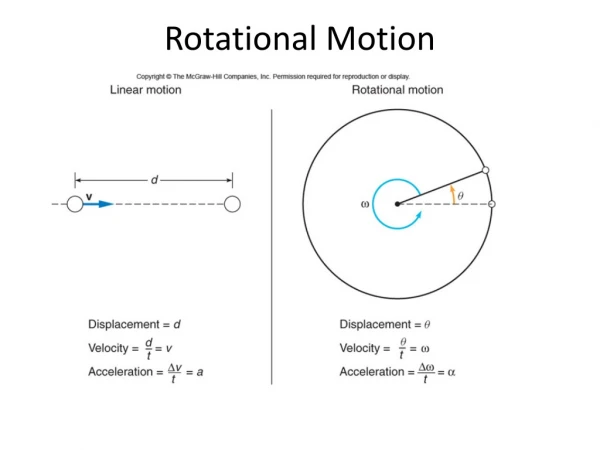
Angular coordinate A car’s speedometer needle rotates about a fixedaxis.
Units of angles One complete revolution is 360° = 2π radians. An angle in radians is = s/r, as shown in the figure.
Angular velocity The averageangularvelocity of a body is The subscript z means that the rotation is about the z-axis.
Angular velocity We choose the angle θ to increase in the counterclockwise rotation.
Instantaneous angular velocity The instantaneousangularvelocity is the limit of average angular velocity as Δθ approaches zero: When we refer simply to “angular velocity,” we mean the instantaneous angular velocity, not the average angular velocity. The z-subscript means the object is rotating around the z-axis. The angular velocity can be positive or negative, depending on the direction in which the rigid body is rotating.
Angular velocity is a vector Angular velocity is defined as a vector whose direction is given by the right-hand rule.
Angular velocity is a vector The sign of ωz for rotation along the z-axis
Rotational motion in bacteria Escherichiacoli bacteria are found in the lower intestines of humans and other warm-blooded animals. The bacteria swim by rotating their long, corkscrew-shaped flagella, which act like the blades of a propeller. Each flagellum is rotated at angular speeds from 200 to 1000 rev/min (about 20 to 100 rad/s) and can vary its speed to give the flagellum an angular acceleration.
Angular acceleration The instantaneous angular acceleration is
Rotation with constant angular acceleration The rotational formulas have the same form as the straight-line formulas, as shown in Table 9.1 below.
Relating linear and angular kinematics A point at a distance r from the axis of rotation has a linear speed of
Relating linear and angular kinematics • For a point at a distance r from the axis of rotation: • its tangential acceleration is atan = • its centripetal (radial) acceleration is arad = v2/r =
The importance of using radians, not degrees! • Always use radians when relating linear and angular quantities.
Rotational kinetic energy The rotational kinetic energy of a rigid body is: The moment of inertia, I, is obtained by multiplying the mass of each particle by the square of its distance from the axis of rotation and adding these products: The SI unit of I is the kilogram-meter2 (kg ∙ m2).
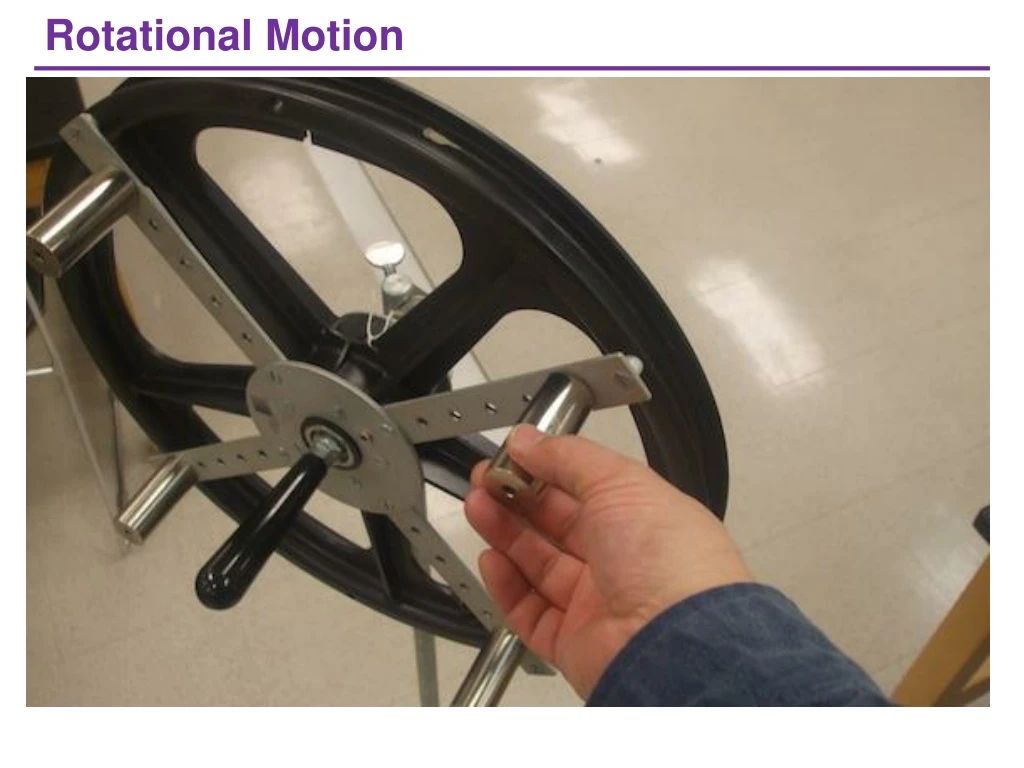
Moment of inertia Here is an apparatus free to rotate around a vertical axis. To reduce the moment of inertia, lock the two equal-mass cylinders close to the center of the horizontal shaft.
Moment of inertia Here is an apparatus free to rotate around a vertical axis. To increase the moment of inertia, lock the two equal-mass cylinders far from the center of the horizontal shaft.
Moment of inertia of a bird’s wing When a bird flaps its wings, it rotates the wings up and down around the shoulder. A hummingbird has small wings with a small moment of inertia, so the bird can move its wings rapidly (up to 70 beats per second). By contrast, the Andean condor has immense wings with a large moment of inertia, and flaps its wings at about one beat per second.
Moment of inertia calculations The moment of inertia of any distribution of mass can be found by integrating over its volume: By measuring small variations in the orbits of satellites, geophysicists can measure the earth’s moment of inertia. This tells us how our planet’s mass is distributed within its interior. The data show that the earth is far denser at the core than in its outer layers.
Moments of inertia of some common bodies: Slide 1 of 4 • Table 9.2
Moments of inertia of some common bodies: Slide 3 of 4 • Table 9.2
Moments of inertia of some common bodies: Slide 4 of 4 • Table 9.2
Gravitational potential energy of an extended body • The gravitational potential energy of an extended body is the same as if all the mass were concentrated at its center of mass: Ugrav = Mgycm. • This athlete arches her body so that her center of mass actually passes under the bar. • This technique requires a smaller increase in gravitational potential energy than straddling the bar.
The parallel-axis theorem There is a simple relationship, called the parallel-axistheorem, between the moment of inertia of a body about an axis through its center of mass and the moment of inertia about any other axis parallel to the original axis.
Loosen a bolt Which of the three equal-magnitude forces in the figure is most likely to loosen the bolt?
Torque The lineofaction of a force is the line along which the force vector lies. The leverarm for a force is the perpendicular distance from O to the line of action of the force. The torque of a force with respect to O is the product of the force and its lever arm.
Torque as a vector Torque can be expressed as a vector using the vector product. If you curl the fingers of your right hand in the direction of the force around the rotation axis, your outstretched thumb points in the direction of the torque vector.
Torque and angular acceleration for a rigid body • The rotational analog of Newton’s second law for a rigid body is: • Loosening or tightening a screw requires giving it an angular acceleration and hence applying a torque.
Why only external torques affect a rigid body’s rotation • Any two particles in the body exert equal and opposite forces on each other.
Problem-solving strategy for rotational dynamics • Identify the relevant concept: You must use. • Set up the problem by using the following steps: • Sketch the situation and identify the body or bodies to be analyzed. Indicate the rotation axis. • For each body, draw a free-body diagram that shows the body’s shape, including all dimensions and angles. Label pertinent quantities with algebraic symbols. • Choose coordinate axes for each body and indicate a positive sense of rotation (clockwise or counterclockwise) for each rotating body. If you know the sense of αz, pick that as the positive sense of rotation.
Problem-solving strategy for rotational dynamics • Execute the solution as follows: • For each body, decide whether it undergoes translational motion, rotational motion, or both. Then apply Newton’s second law, , or both to the body. • Express in algebraic form any geometrical relationships between the motions of two or more bodies. An example is a string that unwinds, without slipping, from a pulley or a wheel that rolls without slipping. These relationships usually appear as relationships between linear and/or angular accelerations. • Ensure that you have as many independent equations as there are unknowns. Solve the equations to find the target variables. • Evaluate your answer.
Rigid body rotation about a moving axis = The kinetic energy of a rotating and translating rigid body is K = 1/2 Mvcm2 + 1/2 Icm2.
Rolling without slipping The motion of a rolling wheel is the sum of the translational motion of the center of mass plus the rotational motion of the wheel around the center of mass. The condition for rolling without slipping is
Combined translation and rotation Airflow around the wing of a maple seed slows the falling seed to about 1 m/s and causes the seed to rotate about its center of mass.
Rolling with slipping The smoke rising from this drag racer’s rear tires shows that the tires are slipping on the road, so vcm is not equal to Rω.
Combined translation and rotation: dynamics The acceleration of the center of mass of a rigid body is: The rotational motion about the center of mass is described by the rotational analog of Newton’s second law: This is true as long as the axis through the center of mass is an axis of symmetry, and the axis does not change direction.
Rolling friction We can ignore rolling friction if both the rolling body and the surface over which it rolls are perfectly rigid. If the surface or the rolling body deforms, mechanical energy can be lost, slowing the motion.
Work in rotational motion A tangential force applied to a rotating body does work on it.
Work and power in rotational motion The total work done on a body by the torque is equal to the change in rotational kinetic energy of the body, and the power due to a torque is: When a helicopter’s main rotor is spinning at a constant rate, positive work is done on the rotor by the engine and negative work is done on it by air resistance. Hence the net work being done is zero and the kinetic energy remains constant.
Angular momentum To find the total angular momentum of a rigid body rotating with angular speed ω, first consider a thin slice of the body. Each particle in the slice with mass mi has angular momentum: Li = miri2ω
Angular momentum For a rigid body rotating around an axis of symmetry, the angular momentum is: For any system of particles, the rate of change of the total angular momentum equals the sum of the torques of all forces acting on all the particles:
Angular momentum The angular momentum of a rigid body rotating about a symmetry axis is parallel to the angular velocity and is given by
Conservation of angular momentum When the net external torque acting on a system is zero, the total angular momentum of the system is constant (conserved).
Conservation of angular momentum A falling cat twists different parts of its body in different directions so that it lands feet first. At all times during this process the angular momentum of the cat as a whole remains zero.
Gyroscopes and precession For a gyroscope, the axis of rotation changes direction. The motion of this axis is called precession.