ACTIVE NOISE CONTROL
ACTIVE NOISE CONTROL. Active noise control implemented by adaptive filtering. By Leonardo Andrés Zheng Xuezhi. Part 1 Introduction to active noise control (on Nov 13rd) Why is “ active ” noise control? How can I achieve active noise control?

ACTIVE NOISE CONTROL
E N D
Presentation Transcript
ACTIVE NOISE CONTROL Active noise control implemented by adaptive filtering By Leonardo Andrés Zheng Xuezhi
Part 1 Introduction to active noise control (on Nov 13rd) Why is “active” noise control? How can I achieve active noise control? • Part 2 Simulation of active noise control (still waited for being studied) (on Dec 18th) What is the LMS algorithm? Do I need some update versions? How does this algorithm (or updated one) work? How can I realize them? (Matlab simulation)
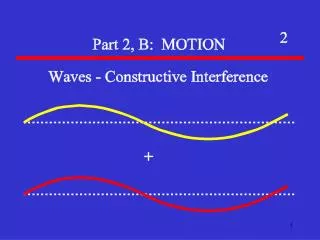
Why is “active” noise control? Physical principle Definition of Active noise control: active noise control works on the principle of destructive interference between the sound fields generated by the original “primary” sound source and that due to other secondary sources, whose acoustic outputs can be controlled. Signal Processing Task (Might DSP be used here?)
Historical Review • Paul Leug: feed-forward control strategy and noise elimination (patent, in 1936) • Harry Olson and Everet May: feedback control strategy and noise elimination (article, in 1956) • An important thing to know here is that both of these two orginal ideas are analog apporches.
How can I achieve active noise control? • Firstly, I need to find some appropriate acoustic principles to suppress the noise. So, what are these acoustic principles? • Secondly, closely related to the first question, to what extent do I want to attenuate the noise: just eliminating or making it small? Please see the slides on acoustic principles and objectives. • Finally, how can I achieve this attenuation? In other words, what kind of control strategies will I use in active noise control? (Feedback and Feedforward)
Acoustic Principles • All strategies of active noise control rely on the principle of linear superpositon. Two kinds of things can screw up the linearity: first, very loud noise (just like in the amplifier);second, loudspeaker (but this problem can be minimized). • Interference: if we do not control the phase difference between two sound waves (like Thomas Young’s two slits interference experiment in optics), in the sound field: at some points, the presure of the sound wave is destructive; however, at other points, the presure of the sound wave is constructive. (Why?) And this way only makes sure some local quiet zone and this acoustic control mechanism is called “vicinity control”. Also, this way will eliminate the noise in the local area. • If we do control the phase difference between two sound waves, for example, making the troughs of the one wave exactly match with the peaks of another wave, the wide area control or global control can be achieved. Ideally, in this way, all noise is eliminated but actuallly in such a large area the well-match between the peaks and troughs can not be achieved. So, we will pay a lot of attention to the minimization of output power. • Please first recall the design of Olson and May…
Destructive Interference (vicinity control) Destructive Interference: Olson and May’s arrangement is: Remarks: Microphone is well-coupled to the secondary source and able to detect the error accurately. Loudspeaker requires a modest voltage, which means the sound wave will not affect other points in the sound field significantly; and also the loudspeaker doesn’t suffer from the nonlinear problem Microphone (monitor) Loudspeaker (secondary source) 1 Microphone Loudspeakers 2 Loudspeaker and microphone are closely arranged.
Remarks: An important prerequisite of global control is the distance between two sources is small enough to compare with the wavelength. (Notice the highlighted condition in the appendix!) But, in reality, we do not know the distance of the amplitude and the phase of the primary source beforehand. So, an optimal design here is employed. Global Control
FEEDBACK CONTROL • According to Olson and May’s arrangement (1956): Primarysource TF from the loudspeaker Signalfrom the mic Active noise system (block diagram) using feedback control Equivalent electricalconfiguration TF from the feedback loop Compensating filter can be used here, but it has a big drawback. Because the compensating filter can only deal with the noise in one frequencyband. However, in reality, the primary source always changes frequency. So, it is a great idea to use adaptive filter here to replace the compensating filter. Indeed, it is a feedforward system. Feedforward has an ability to “predict” . C’(z) = Adaptative filter LMS. W(z) = Adaptative filter x LMS. Equivalent block diagram if C’(z) = C(z) Block diagram with the digital controller
FEEDFORWARD CONTROL • According to Paul Leug’s design: Referencesignal (correlatedwithprimarysource) C: TF from the secondaysource source). P: TF from the primarysource. W: TF from the controller (adaptative filter). A referencesignal (obtainedfrom a mechanical source) is used to drive the controller via the electrical controller. Anelectrical model is usedwithin controller to extract the influence of the secondarysource in the referencesignal. Ideal case: In the broadband case, the filter willbedesinged to give the best approximate response.
Summary Control Strategy Acoustic Objectives Quiet zone Feed-forward Noise elimination Power absorption Feedback Not an efficient way! Noise minimization---power output minimization Remarks: indeed the feedback strategy ends up as a similar feed-forward strategy.
Further study and reference • To study LMS algorithm or its updated algorithm in step 2. • To design and simulate an adaptive filter in Matlab. • To solve any possible problem that is to pop up later. • Reference: • Active Noise Control, S.J. ELLIOTT AND P.A.NELSON • www.ait.gr/Publevents/14112005_ActiveNoise_cbou.pdf • Principles of Optics: Electromagnetic Theory of Propagation, Interference and Diffraction of Light, Max Born and Emil Wolf, Cambridge University Press, 1999