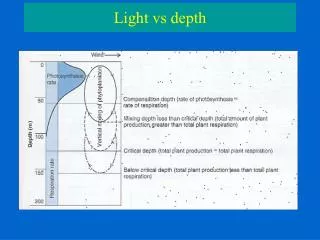
Time vs Depth Migration
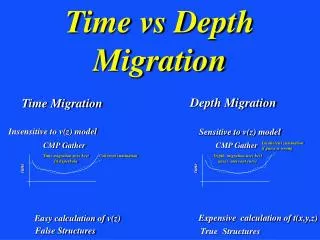
Time vs Depth Migration. CMP Gather. CMP Gather. time. time. Depth Migration. Time Migration. Insensitive to v(z) model. Sensitive to v(z) model. Incoherent summation if guess is wrong. Time migration uses best fit hyperbola. Coherent summation. Depth migration uses best

Time vs Depth Migration
E N D
Presentation Transcript
Time vs Depth Migration CMP Gather CMP Gather time time Depth Migration Time Migration Insensitive to v(z) model Sensitive to v(z) model Incoherent summation if guess is wrong Time migration uses best fit hyperbola Coherent summation Depth migration uses best guess moveout curve Expensive calculation of t(x,y,z) Easy calculation of v(z) False Structures True Structures
Stacked Section time Depth Migration Time Migration Stacked Section M(x,z) M(x,T) time Low-velocity zone Low-velocity zone False structure
g g g m(x,z) = 2-way vertical traveltime z 2 2 d (g, 4[(x-g)/c] + (2z/c) ) 2 2 d (g, 4[(x-g)/c] + T ) m(x,z(T)) = 2 2 d (g, 4[(x-g)/c] + T ) M(x,T) = Depth Migration -> Time Migration Depth Migration: Maps data into function(x,z) We know 2z/c=T so Time Migration: Maps data into function(x,T)
g,s 2 2 + [(x-s)/c] + (z/c) ) 2 2 2 2 + d (g,s, [(x-g)/c] + T ) M(x,T) = Prestack Time Migration Depth Migration: Maps data into function(x,z) 2 2 m(x,z) = d (g,s, [(x-g)/c] + (z/c) g,s [(x-s)/c] + T
g c(T) v1 v2 T v3 v4 v5 v6 Time Migration for c(T) Time Migration: Maps data into function(x,T) 2 2 M(x,T) = d (g, 4[(x-g)/c(T)] + T ) More generally, c(T) is a function of T!
g m(x,z) = Loop over x in model Loop over z in model d (g, ) xg MATLAB ZO Depth Migration for ixtrace=1:ntrace; for ixs=istart:iend; for izs=1:nz; r = sqrt(4*(ixtrace*dx-ixs*dx )^2+(2*izs*dx)^2); time = 1 + round( r/c/dt ); mig(ixs,izs) = mig(ixs,izs)/r + data(ixtrace,time); end; end; end; Traveltime Table Traveltime
g 2 2 M(x,T) = Loop over x in model Loop over x in model Loop over z in model Loop over iT in model MATLAB ZO Time Migration d (g, 4[(x-g)/c(T)] + T ) for ixtrace=1:ntrace; for ixs=istart:iend; for izs=1:nz; r = sqrt(4*(ixtrace*dx-ixs*dx )^2+(2*izs*dx)^2); time = 1 + round( r/c/dt ); mig(ixs,izs) = mig(ixs,izs)/r + data(ixtrace,time); end; end; end; for ixtrace=1:ntrace; for ixs=istart:iend; for iT=1:nT; time = sqrt(4*([ixtrace*dx-ixs*dx]/c(iT))^2+(iT*dt)^2); time = 1 + round( time/dt ); mig(ixs,iT) = mig(ixs,iT)/r + data(ixtrace,time); end; end; end; Traveltime Table Traveltime Traveltime Note: c(iT) or c(ixtrace,iT)
g 2 2 M(x,T) = Loop over x in model Loop over iT in model MATLAB ZO Time Migration d (g, 4[(x-g)/c(T)] + T ) for ixtrace=1:ntrace; for ixs=istart:iend; for iT=1:nT; time = sqrt(4*([ixtrace*dx-ixs*dx]/c(iT))^2+(iT*dt)^2); time = 1 + round( time/dt ); mig(ixs,iT) = mig(ixs,iT)/r + data(ixtrace,time); end; end; end; Traveltime Note: c(iT) or c(ixtrace,iT)
Time Migration vs Depth Migration 2 2 M(x,T) = d (g, 4[(x-g)/c] + T ) Insensitive to c(z) model Time migration uses best fit hyperbola
Time Migration vs Depth Migration 2 2 M(x,T) = d (g, 4[(x-g)/c] + T ) Insensitive to v(z) model Time migration uses best fit hyperbola
Time Migration vs Depth Migration 2 2 M(x,T) = d (g, 4[(x-g)/c] + T ) Insensitive to v(z) model Time migration uses best fit hyperbola
Time Migration vs Depth Migration 2 2 M(x,T) = d (g, 4[(x-g)/c] + T ) Insensitive to v(z) model Time migration uses best fit hyperbola
Summary: Time Migration vs Depth Migration 2 2 M(x,T) = d (g, 4[(x-g)/c] + T ) =c/f M(x,z) = d (g, t ) gx Insensitive to v(z) model Sensitive to v(z) model Incoherent summation if guess is wrong Time migration uses best fit hyperbola Coherent summation Depth migration uses best guess moveout curve Cheaper: no ray tracing More expensive: ray tracing Stretched wavelet thickness Uniform wavelet thickness 1/f Best focusing if v(x,z) correct Best focusing if v(x,z) really wrong Good focusing if v(x,z) smooth
Conclusions • Depth Migration in Deep GOM is only Way to Go if V(x,y,z) Correct • Therefore, spend time to get v(x,y,z) Correct: Tomography, MVA, Waveform Inversion
NMO Velocity Analysis 2 2 M(x,T) = d (g, 4[(x-g)/c] + T ) CMP C(T) T Time x c
Nyquist Sampling Frequency & Aliasing Data Aliasing Problem Dt > T/2 Aliasing Solution Low-pass filtering data Fancy Interpolation Finer time spacing digital signal High freq. masqerade as low freq.
Migration Aliasing 2D dot product of migration Operator and d(g,t) Data Aliasing Problem Dx > lx/2 Aliasing Solution Low-pass filtering data Fancy Interpolation Finer rec-src spacing No data aliasing: (dx/dt)min Tmin/2 > Dx lx/2
Operator Aliasing (m(x)=dot product data by mig. Operator) 2D dot product of migration Operator and d(g,t) (dx/dt)min Tmin/2 > Dx