Download
1 / 35
350 likes | 392 Vues
Repository of examples. V2 9/3/08. 1 – The TinyTurtle. Subjects Math, geometry, procedural programming, basic robotics Language NXT-G State Developed Description The basic Logo turtle with its main 4 motion commands It uses parameterized user blocks. Rt.

E N D
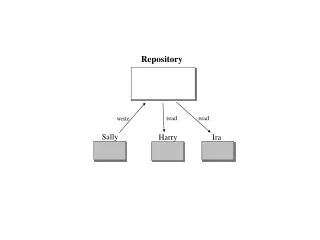
Repository of examples V2 9/3/08
1 – The TinyTurtle • Subjects • Math, geometry, procedural programming, basic robotics • Language • NXT-G • State • Developed • Description • The basic Logo turtle with its main 4 motion commands • It uses parameterized user blocks
Rt • The Rt command can be improved using the new parameter block instead of a common variable
2 – The following head • Subjects • Time programming, simple strategy, sensor management • Language • NXT-G • State • Developed • Description • The sonar head follows your hand
The program LA LB
The program SA LC
The program LC SB LA
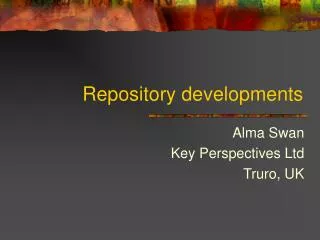
3 – The slope • Subjects • Phisycs, sensor data logging and elaboration • Language • NXT-G • State • Developed • Description • The sonar measurement is logged and used to study a uniformly accelerated motion (due to the gravity acceleration)
displacement velocity Analyzing the results • The measures • The theory
4 – Doppler • Subjects • Physics, acoustic, controlling motion • Language • NXT-G, NXC • State • Developed • Description • The doppler effect is used to estimate the constant speed of the vehicle • The obtain speed can be compared with the speed measured by the robot itself
Doppler • 2Khz emission
5 – The positioner • Subjects • Analytical and simple geometry, solution through an approximation algorithm, 2D cartesian motion • Language • NXC (NXT-G) • State • Developed • Description • First the robot calculates its position measuring its distance from two obstacles of known position, then it can reach a target position
A solution through approximations • Depending of the area where the temporary solution is found, it is moved towards the final solution
6 – The shadow • Subjects • Geometry, trigonometry, light sensing • Language • NXC • State • Developed • Description • The distance between the light source and the obstacle is indirectly calculated measuring the length of the shadow
7 – Multithreaded follower • Subjects • Multitasking and multibehavior, concurrent programming • Language • NXT-G (NXC) • State • Developed • Description • An example to show the request of multitasking for multibehavioral applications • Interferences on concurrent programming are shown as well
The solution • Multi behaviors
8 – Discovery Bool • Subjects • Logic, Boolean algebra • Language • NXC, NXT-G • State • Under development • Description • Discovering basic boolean operator through the motion of the robot
9 – Turing-bot • Subjects • Theoretical computer science, simulation • Language • NXC? • State • Under development • Description • Simulation of the Turing machine
10 – Happy strings • Subjects • Theoretical computer science, simulation, formal grammars and linguistic • Language • NXC? • State • Under development • Description • Using a finite state automata simulation (the robot physically moves from state to state) to recognize string properties
11 – Scaling?? • Subjects • Geometry, Topography • Language • ?? • State • Under development • Description • The robot reproduces something using a given scale
12 – Easy proportions?? • Subjects • Math, Geometry • Language • ?? • State • Under development • Description • A proportion (like 6:5=12:10) is given in terms of the length of the edges of a couple of rectangles • The robot verifies some properties ???
13 – Friend/Sister gravity • Subjects • Math, physics • Language • ?? • State • Under development • Description • How to discover the gravity acceleration
14 – Trees • Subjects • Computer science, theoretical infrmatics • Language • ?? • State • Under development • Description • The robot physically calculates the width of a tree (as a data structure)
15 – Kind spring • Subjects • Math, physics • Language • ?? • State • Under development • Description • How to calculate the elongation constant of a spring
16 – Intelligent interpreter • Subjects • Artificial intelligence, coding • Language • NXC • State • Under development • Description • A trained neural network is used to recognize ‘linear’ symbols like the Morse code that are translated in simple robot commands
Alveare 17 – Bee-bot • Subjects • Natural science, behaviors and strategies • Language • NXT-G • State • Developed • Description • Using a light sensor, the robotic bee try to find a ‘flower’ (a black area on the plane) following wider and wider paths
n – ?? • Subjects • ?? • Language • ?? • State • Developed • Description • ?? • ??