Advancements in Robotics: Achievements and Innovations at RoboCup 2006
This document outlines the significant achievements of our robotics team at RoboCup and other competitions. Since 1998, we have maintained a 100% qualification rate for Eurobot and ranked 4th out of hundreds in the European arena. We won the Per'Ac robot competition and have numerous publications highlighting our advancements. The paper discusses our architecture, methods, and the integration of multi-agent programming, real-time interaction, and 3D vision technology, as well as unique contributions to RoboCup-at-Home applications.

Advancements in Robotics: Achievements and Innovations at RoboCup 2006
E N D
Presentation Transcript
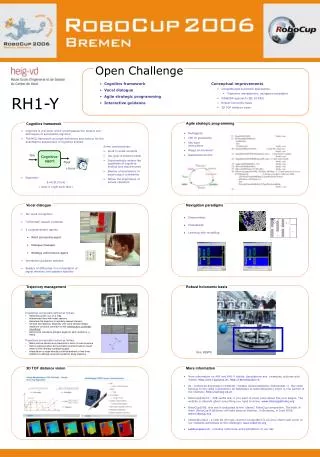
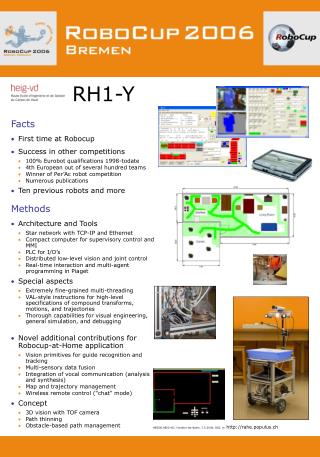
RH1-Y • Facts • First time at Robocup • Success in other competitions • 100% Eurobot qualifications 1998-todate • 4th European out of several hundred teams • Winner of Per’Ac robot competition • Numerous publications • Ten previous robots and more • Methods • Architecture and Tools • Star network with TCP-IP and Ethernet • Compact computer for supervisory control and MMI • PLC for I/O’s • Distributed low-level vision and joint control • Real-time interaction and multi-agent programming in Piaget • Special aspects • Extremely fine-grained multi-threading • VAL-style instructions for high-level specifications of compound transforms, motions, and trajectories • Thorough capabilities for visual engineering, general simulation, and debugging • Novel additional contributions for Robocup-at-Home application • Vision primitives for guide recognition and tracking • Multi-sensory data fusion • Integration of vocal communication (analysis and synthesis) • Map and trajectory management • Wireless remote control ("chat" mode) • Concept • 3D vision with TOF camera • Path thinning • Obstacle-based path management HESSO.HEIG-VD, Yverdon-les-Bains, 7.5.2006, JDD, re. http://rahe.populus.ch