Download
1 / 6
60 likes | 231 Vues
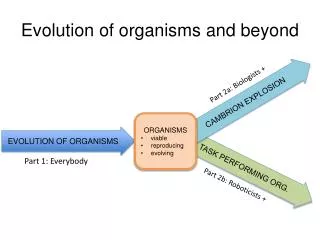
Evolution of organisms and beyond. CAMBRION EXPLOSION. Part 2a: Biologists +. ORGANISMS viable reproducing evolving. EVOLUTION OF ORGANISMS. TASK PERFORMING ORG. Part 1: Everybody. Part 2b: Roboticists +. Evolution of organisms. PART 1. EVOLUTION OF ORGANISMS. Swarm.

E N D
Evolution of organisms and beyond CAMBRION EXPLOSION Part 2a: Biologists + • ORGANISMS • viable • reproducing • evolving EVOLUTION OF ORGANISMS TASK PERFORMING ORG. Part 1: Everybody Part 2b: Roboticists +
Evolution of organisms PART 1 EVOLUTION OF ORGANISMS Swarm Organism body(morphology) Organism with basic functionalities Organism performing user defined tasks • Possible tasks • Lift object • Peek above wall • … • Basic functionalities • Move • Feed • Reproduce
Ambition for 2012-2013 • 4th annual review meeting (spring 2012): WE DID IT ! (in simulation) • Final review meeting (spring 2013): WE DID IT ! (in real robots)
What • Swarm organism evolving population of organisms • By 15 february 2012 • “Without hands” • In simulation (and in hardware a year later !) • Organisms must be • Viable (move, eat) • Self-reproducing (at organism level) • Evolving (under environmental pressure, no task) • One demo (movie) is enough - no statistics etc needed • Report in Y4 annual report • Presentation during 4th review meting
How • HIGHLY FOCUSED R & D • Small task force – nobody is excluded though, open invitation • Genuine commitment (no hobby horses, < 100% OK) • Strong leadership based on collective mandate – temporary • VERY INTENSIVE COOPERATION • Kickoff end of October + weekly skype meeting • Dedicated repository (experimental plans, code, data) • (Sub)tasks ID’d, distributed, scheduled, monitored • Experiments : • In Robo3D • Explorative / tuning / debugging experiments on partners’ HW • Real demo experiments on central Symbrion HW (Prague?) • Everything integrated and ran in January
Sometechdetails • Controllers • Type of controller(for robots) • Organism controller • Geneticcodefor shape + controller (genetic = inheritable) • Reproductionmechanism for organism (both shape and controller) • Morphogenesis (growth mechanism) • On-line on-board evolution • Operator design • Fitness design • Environment(s) & scenario(s) • SIMULATOR !!! ???