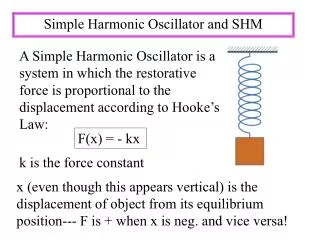
Understanding Damped and Forced Simple Harmonic Motion in Physics
220 likes | 362 Vues
This lecture by Professor Lee Carkner covers the key concepts of damped and forced simple harmonic motion (SHM). It explores the effects of damping on oscillating systems, including variations in maximum kinetic and potential energy, the role of friction, and how applied forces create forced oscillations. Additionally, it discusses resonance phenomena and how the period changes in damped systems. By examining cases like the Tacoma Narrows disaster, this lecture connects theoretical principles of SHM with practical applications in understanding planetary motion, energy loss, and frequency analysis.

Understanding Damped and Forced Simple Harmonic Motion in Physics
E N D
Presentation Transcript
Damped and Forced SHM Physics 202 Professor Lee Carkner Lecture 5
PAL #4 Pendulums • Double amplitude (xm) • k depends only on spring, stays same • vmax = -wxm, increases • Increase path pendulum travels • v must increase (since T is constant, but path is longer) so max KE increases • If max KE increases, max PE increases • Clock runs slow, move mass up or down? • Since T = 2p(L/g)½, want smaller L, move weight up
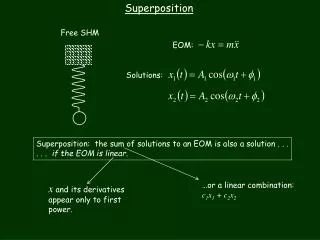
Uniform Circular Motion • Consider a particle moving in a circle with the origin at the center • The projection of the displacement, velocity and acceleration onto the edge-on circle are described by the SMH equations
Uniform Circular Motion and SHM y-axis Particle moving in circle of radius xm viewed edge-on: Particle at time t xm wt+f x-axis x(t)=xm cos (wt+f)
Observing the Moons of Jupiter • He discovered the 4 inner moons of Jupiter • He (and we) saw the orbit edge on
Application: Planet Detection • The planet cannot be seen directly, but the velocity of the star can be measured • The plot of velocity versus time is a sine curve (v=-wxmsin(wt+f)) from which we can get the period
Orbits of a Star+Planet System Center of Mass Vplanet Star Planet Vstar
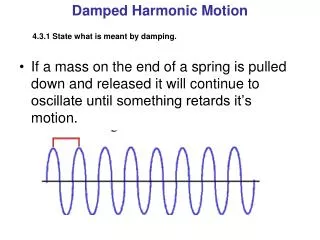
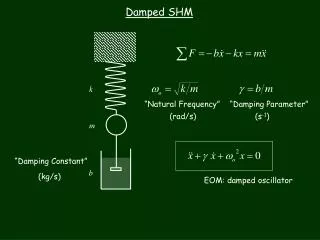
Damped SHM • Consider a system of SHM where friction is present • The damping force is usually proportional to the velocity • If the damping force is represented by • Where b is the damping constant • Then, x = xmcos(wt+f) e(-bt/2m) x’m = xm e(-bt/2m)
Energy and Frequency • The energy of the system is: E = ½kxm2 e(-bt/m) • The period will change as well: w’ = [(k/m) - (b2/4m2)]½
Damped Systems • Most damping comes from 2 sources: • Air resistance • Energy dissipation • Lost energy usually goes into heat
Forced Oscillations • If you apply an additional force to a SHM system you create forced oscillations • If this force is applied periodically then you have 2 frequencies for the system w = wd = • The amplitude of the motion will increase the fastest when w=wd
Resonance • Resonance occurs when you apply maximum driving force at the point where the system is experiencing maximum natural force • All structures have natural frequencies
Summary: Simple Harmonic Motion x=xmcos(wt+f) v=-wxmsin(wt+f) a=-w2xmcos(wt+f) w=2p/T=2pf F=-kx w=(k/m)½ T=2p(m/k)½ U=½kx2 K=½mv2 E=U+K=½kxm2
Summary: Types of SHM • Mass-spring T=2p(m/k)½ • Simple Pendulum T=2p(L/g)½ • Physical Pendulum T=2p(I/mgh)½ • Torsion Pendulum T=2p(I/k)½
Summary: UCM, Damping and Resonance • A particle moving with uniform circular motion exhibits simple harmonic motion when viewed edge-on • The energy and amplitude of damped SHM falls off exponentially x = xundamped e(-bt/2m) • For driven oscillations resonance occurs when w=wd