Advancements in Robotic Frameworks: Insights from RoboCup and European Competitions
This document outlines the achievements and methodologies of a robotics team focusing on the RoboCup initiative. It highlights their successful participation in various competitions, including a notable 4th place at RoboCup at Home in Atlanta and sustained qualifications in Eurobot from 1998 to 2006. Noteworthy aspects include the architectural design utilizing TCP/IP and Ethernet for networking, innovative multi-agent programming, and advanced sensory integration for improved interaction and navigation. The research contributes to future robotic applications, particularly in home automation and intelligent interaction.

Advancements in Robotic Frameworks: Insights from RoboCup and European Competitions
E N D
Presentation Transcript
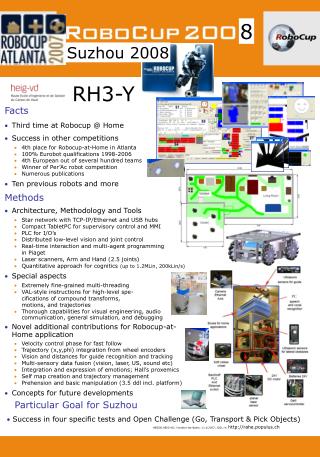
8 Suzhou 2008 RH3-Y • Facts • Third time at Robocup @ Home • Success in other competitions • 4th place for Robocup-at-Home in Atlanta • 100% Eurobot qualifications 1998-2006 • 4th European out of several hundred teams • Winner of Per’Ac robot competition • Numerous publications • Ten previous robots and more • Methods • Architecture, Methodology and Tools • Star network with TCP-IP/Ethernet and USB hubs • Compact TabletPC for supervisory control and MMI • PLC for I/O’s • Distributed low-level vision and joint control • Real-time interaction and multi-agent programming in Piaget • Laser scanners, Arm and Hand (2.5 joints) • Quantitative approach for cognitics (up to 1.2MLin, 200kLin/s) • Special aspects • Extremely fine-grained multi-threading • VAL-style instructions for high-level spe- cifications of compound transforms, motions, and trajectories • Thorough capabilities for visual engineering, audio communication, general simulation, and debugging • Novel additional contributions for Robocup-at-Home application • Velocity control phase for fast follow • Trajectory (x,y,phi) integration from wheel encoders • Vision and distances for guide recognition and tracking • Multi-sensory data fusion (vision, laser, US, sound etc) • Integration and expression of emotions; Hall’s proxemics • Self map creation and trajectory management • Prehension and basic manipulation (3.5 ddl incl. platform) • Concepts for future developments Particular Goal for Suzhou • Success in four specific tests and Open Challenge (Go, Transport & Pick Objects) HESSO.HEIG-VD, Yverdon-les-Bains, 11.6.2007, JDD, re. http://rahe.populus.ch