Download
1 / 20
200 likes | 221 Vues
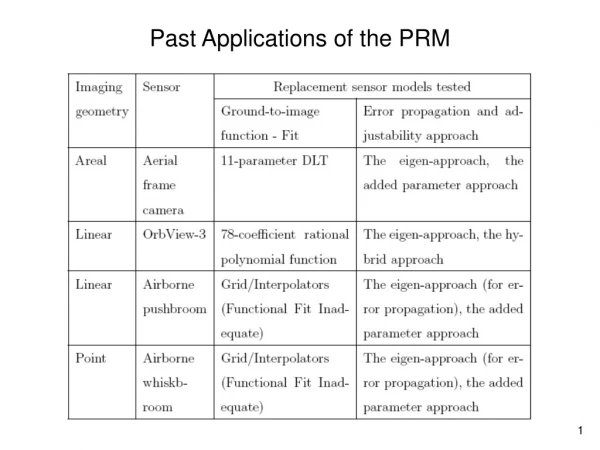
This study evaluates error propagation and adjustment methods in remote sensing applications using various image capture techniques and sensor types. Results show high performance and accuracy in model fitting and error assessment. The use of additional parameters and various interpolation methods improve fit accuracy and adjustability. Suggestions are made for enhancing the precision of image processing with segmented images and rigorous triangulation. The study presents comprehensive insights into the development of error propagation models in remote sensing analysis.

E N D
Simulated Oblique Aerial Frame PhotographsBlock adjustment(H = 700 m) • Both approaches show high performances in this case Absolute Relative
Spaceborne Linear Array Sensor – OrbView-3 • A priori physical model parameters • 9 parameters: [δXL0 δYL0 δZL0 δω0 δω1 δφ0 δφ1 δκ0 δκ1 ] • 78-coefficient rational polynomial functions are used as ground-to-image functions • Error propagation and adjustability using • The Eigen-Approach • The Hybrid Approach • The eigen-approach parameters replace first-order terms of the physical parameters • The added parameters replace zero-order terms
OrbView-3 (cont’d)Fit accuracy and error propagation assessmenton check grids • Fit grids (X,Y,Z) : 33 x 17 x 9 = 5,049 points • Check grids : 31,416 points • Both fit accuracy and error propagation are satisfactory
OrbView-3 (cont’d)Performance tests for model fitting and error propagationTwo-image ground point intersection • Both approaches show satisfactory performance • Results (horizontal differences and errors) are also consistent with the results on check grids (the previous table) Absolute Relative
OrbView-3 (cont’d)Performance tests for error propagation and adjustabilityTwo-image space triangulation • Both approaches show satisfactory performance • Results on check points are also consistent with those using rigorously triangulated support data Absolute Relative
Airborne Pushbroom Sensor • A priori physical parameters: 9 parameters • Grid/Interpolators are used as ground-to-image functions • Error propagation using • The Eigen-Approach • The ground space added parameters approach that has 9 parameters • Adjustability using the added parameters approach
Airborne Pushbroom Sensor (cont’d) • The ground space added parameters approach • Using the general 3D-to-3D polynomial transformation with conformal conditions imposed on every pair of equations
Airborne Pushbroom Sensor (cont’d)Fit accuracy assessment on check grids • Comparing tri-quadratic and tri-cubic interpolators • Both interpolators show satisfactory results • Tri-cubic interpolator slightly improves RMS on sample accuracy, taking into consideration • Waviness of the image • Points lie near outmost sides of the grids may be affected by the third order polynomial • Heavier computational loads compared to the tri-quadratic
Airborne Pushbroom Sensor (cont’d)Performance test for model fitting and error propagation • Error propagation performance. The two replacement approaches show small differences, < 2%, from the rigorous model. • Fitting performance. The horizontal difference is about half of GSD, 2.2 meters. This is consistent with the fit accuracy of check grids. Absolute Relative
Airborne Pushbroom Sensor (cont’d)Performance test for error propagation and adjustability • Adjustability of the added parameters approach show consistent results with both • The rigorous model • The case when rigorously triangulated support data is used in the implementation of rsm. Absolute Relative
Airborne Whiskbroom Sensor • A priori physical parameters: 9 parameters • Grid/Interpolators are used as ground-to-image functions • Error propagation using • The Eigen-Approach • The ground space added parameters approach that has 9 parameters • Adjustability using the added parameters approach
Airborne Whiskbroom Sensor (cont’d) • Comparing tri-quadratic and tri-cubic interpolators • Both show satisfactory results, except the maximum difference in line using the tri-cubic interpolator • Similar considerations as for the airborne pushbroom sensor
Airborne Whiskbroom Sensor (cont’d)Performance test for model fitting and error propagation • Error propagation performance. The eigen-approach shows larger difference in CE90, ~13%. • The eigen-approach implementation used only one set of polynomial functions (Fline,Fsamp) for the whole image which may not be sufficiently accurate for the image with large FOV > 60° • Suggest the use of polynomial functions fit to segmented images • Fitting performance is consistent with check grid fit accuracy Absolute Relative
Airborne Whiskbroom Sensor (cont’d)Performance test for error propagation and adjustability • Adjustability of the added parameters approach show the difference of about 12% in CE90 • Similar suggestion to use segmented image • The result is consistent to the case when rigorously triangulated support data is used in the implementation of replacement model. Absolute Relative
PRM • Complete PRM Development of Error Propagation/Adjustability for Grid/Interpolator and the Hybrid Approaches • Complete Cases That Were Not Exhaustively Studied In Airborne/Spaceborne Pushbroom and Whiskbroom Such as : • Apply the Adjustability of Grid Interpolation with Image-space Added Parameters to Airborne Pushbroom and Whiskbroom • Extend Hybrid Approaches To Airborne Pushbroom and Whiskbroom • Apply the Adjustability of Image-space and Object-space Added Parameters to Spaceborne Pushbroom • Extend to QuickBird If Possible (Sponsor To Provide Real Data Over Purdue Campus)
PRM (Cont’d) • Complete PRM Development of Error Propagation/Adjustability for Grid/Interpolator and the Hybrid Approaches (Cont’d) • Research in Depth The Concept of Distribution of Adjustable Parameters Between Eigen And Added Parameters • Grid/Interpolator : Can Adjustability Be Done with Grid/Interpolator as PRM (In The Absence Of Added Parameters)?
PRM (Cont’d) • Extend PRM to Other Passive Sensors, e.g. SYRES2 and RAPTOR EO (Seek Others Proposed by The Sponsor, If Any) • Explore the Application of PRM to Active Sensors, e.g. Past Work on Simulated SAR Data, Real SAR Data (If Available) • Investigate And Explore The Application Of PRM To LIDAR (May Need The Sponsor To Provide Us With The Original Signal Data To Allow For Proper Modeling)
Product Accuracy Study • Initial Tasks • Review geospatial coordinate accuracy methods currently used by NGA. Consider both cases: • Based on Diagnostic Data • Based on Covariance Propagation • Investigate applicability of currently used methods to current geo-positioning data
Product Accuracy Study (Cont’d) • Further Research Tasks • Provide new, improved, accuracy and error assessment methods in geospatial coordinates. • Investigate alternatives to fundamental assumptions supporting existing accuracy estimation process. • Use simulated and real-world data samples to support alternatives.