Download
1 / 12
120 likes | 143 Vues
Explore NASA Ames Research Center's intelligent robotics technologies for mission planning, docking, sample return, and data processing for small bodies like Phobos, Deimos, and Tempel 1. Requires shape models, lidar topography, radio science products, and mineralogical maps. Utilizes real-time visualizations and simulations for surface operations and debris field simulations.

E N D
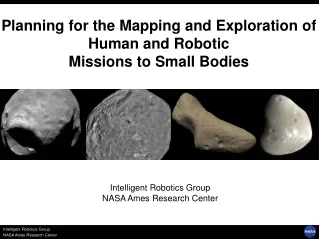
Intelligent Robotics Group NASA Ames Research Center Planning for the Mapping and Exploration of Human and Robotic Missions to Small Bodies Intelligent Robotics Group NASA Ames Research Center
Intelligent Robotics Group NASA Ames Research Center Mission Scenarios • Rendezvous (target acquisition, approach, mapping) • - includes orbiting, hovering, slow hyperbolic flybys • - 14-30 days in close formation • - deal with debris around the body • - objectives: “real-time” shape/terrain/gravity/density models to support docking/landing • Docking/Anchoring and Landing • - match the dynamics of the NEA • - requires good compaction/density/mechanical stability of the terrain • - crew tethered to spacecraft or surface • - moving surface materials can impact the safety of the crew • - surface operations using impactors- remote or drills -in-situ) • - objectives: very high resolution mapping and prepare for sample return • Sample return • - sites are identified based on scientific interest and safety criteria • - sample collection may perturb the environment
Intelligent Robotics Group NASA Ames Research Center Requirements
Intelligent Robotics Group NASA Ames Research Center Mission Data Eros (NEAR Shoemaker 98, 00) Vesta (Dawn 2011) Phobos Deimos Itokawa (Hayabusa 2005) Tempel 1(Deep Impact 2005, Stardust 2011) Ceres (Hubble)
Intelligent Robotics Group NASA Ames Research Center Mission Data Geographos (Goldstone radar, CA, 1994) Gaspra (Galileo 91) Ida (Galileo 93) Mathilde (NEAR Shoemaker 97) Annefrank (Stardust 02) Comet Wild2 (Stardust 04)
Intelligent Robotics Group NASA Ames Research Center Simulation/Processing Tools - ISIS developed by USGS - Ames Stereo Pipeline: ARC - Vision Workbench: ARC - Shape Models: Stereo Photoclinometry, etc. Small Body Visualization developed tool at Applied Physics Laboratory Viz, Verve developed at ARC
Intelligent Robotics Group NASA Ames Research Center Data Product Recommendations Small Body Dynamic Model - spin period - axis of rotation - perturbations due to solar radiations, debris or satellites Small Planetary Body Mapping Standard Development True 3D Projection Support Eros surface reference system Eros shape model
Intelligent Robotics Group NASA Ames Research Center Data Product Recommendations Shape Models - flyby image data - radar measurements - critical to mass/gravity/density/porosity models Eros shape model - radar Control network - visual feature extraction, matching, image-lidar alignment Digital Terrain Models - Global DTM maps (stereo) - Local Maps (photoclinometry) - DTM accuracy precision maps - Lidar maps Lidar topography map on Eros Image and Albedo Mosaics - simulate imagery under arbitrary illumination conditions - understand the surface properties
Intelligent Robotics Group NASA Ames Research Center Data Product Recommendations Radio Science Products - Mass estimates (spacecraft trajectory) - Gravity field - Density (from mass and volumetric meas.) - Porosity (from volumetric and density meas.) Critical for refining close operations and surface activity Eros gravity field map (Bouguer’s map) Gravitational slopes of 1999 KW4-Alpha Subsurface Radar Maps - Synthetic aperture radar (sub meter range) - Ground penetrating radar
Intelligent Robotics Group NASA Ames Research Center Data Product Recommendations Mineralogical (Multispectral - UV and infra red) Maps - infrared maps determine location of surface materials (metals, silicates, olivines, etc) - UV spectra detects debris field in the close vicinity of the body - used with topography, albedo, thermal maps Elemental composition on Eros from Gamma Ray spectrometer NEAR infrared spectrometer measurements Thermal Inertia Map - presence of rocks under the surface
Intelligent Robotics Group NASA Ames Research Center Data Processing Gaps for Small Bodies • Fully automatic geodetical control of the entire data available • Generation of standard coordinate systems and coordinate frames • Improved accuracy solutions for stereo photoclinometry • Multi-view (instead of stereo) 3D terrain reconstruction • Lidar and image co-registration for accurate camera position estimation • Real-time fully automatic crew and rover localization • High resolution albedo maps • High accuracy DTM to properly project multispectral and mineralogical data • Tools to determine in simultaneous solutions the spacecraft position and pointing and body size, shape, mass and gravity field
Intelligent Robotics Group NASA Ames Research Center Visualization and Simulation Gaps • Projection and coordinate system standards for mapping highly irregular bodies • Real-time integrated multi-view visualization support for ground control, astronauts in the spacecraft and surface • Real-time visualization and registration of new mapping products from various instruments • Support for dynamic illumination condition simulations • Comprehensive debris field simulation in low gravity conditions • Line-of-sight communication planning and prediction tools for highly dynamic small body mission scenarios