Stairs Cleaning Robot
160 likes | 457 Vues
Stairs Cleaning Robot. Connie Lisu Ahmad Naqeeb Yahya. Problem Statement. Many complaints arise because stairs can take many more hours to dry than do typical carpeted floors.

Stairs Cleaning Robot
E N D
Presentation Transcript
Stairs Cleaning Robot Connie Lisu Ahmad NaqeebYahya
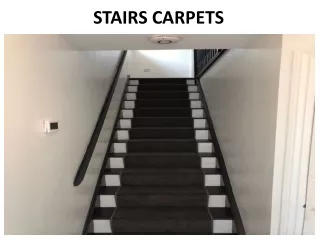
Problem Statement • Many complaints arise because stairs can take many more hours to dry than do typical carpeted floors. • It's rare that the stairs receive the same treatment. Weeks, even months, can go by without stairs receiving a proper vacuuming. • Solid load builds up in stairs which can be extreme at times. • Designs for structured obstacles.
Goals and Objectives • Primary Objective • Robot movement: • Sideways, Descent • Not tip over • Secondary Objective • Installing vacuum cleaner components • Roller brushes, suction cup, absorbent bag, filter Kakudou, T. (2011) . Study on Mobile Mechanism for a Stair Cleaning Robot , Design of Translational Locomotion Mechanism . Department of Intelligent Mechanical Systems, Okayama University, Okayama 700-8530, Japan.
Highlights of Technologies and Innovative Ideas • Rover 5 Motor Driver Board ROB-11593 • H-Bridges • Four motor outputs; four encoder inputs • Vex Bumper Switches • SPST switch; 3-wire cable • Signal behavior: Maintains digital HIGH signal • Arduino Uno R3 • Atmega328 microcontroller • 16Mhz clock speed, 14 I/O pins • Scissor Lift • Vex Gear Kit (12-, 36-, 60-, and 84-tooth gears) • Vex Metal and Hardware Kit (bars, shafts, bearings and etc)
System Details I • Rover 5 Motor Driver Board • Four pins are connected to Arduino Uno for motor directions and voltage control (PWM) • 6 x 1.5V NiMH as voltage source • One pin for current measurement
System Details I • unsigned long start;inttime_to_go;void loop (){analogWrite (MOTORA, 200);analogWrite (MOTORB, 200); • analogWrite (MOTORC, 200);analogWrite (MOTORD, 200); start = millis (); // check current drain while (millis () - start < time_to_go) { if (analogRead (0) > 325) // > 1.46 amps break; } switch (phase++ & 3) { case 0: digitalWrite (DIRECTIONA, 1); digitalWrite (DIRECTIONB, 1); time_to_go = TIME_FORWARDS; break; • case 1: digitalWrite (DIRECTIONC, 0); digitalWrite (DIRECTIOND, 0); time_to_go = TIME_BACKWARDS; break; } // end of switchanalogWrite (MOTORA, 0);analogWrite (MOTORB, 0); • analogWrite (MOTORC, 0);analogWrite (MOTORD, 0); delay (500);} // end of loop
System Details II • Arduino Uno + Vex Bumper Switches: • 9V battery • Force on bumper switch changes the switch state • Bump on either switch will reverse the current direction of the motors
System Details II • #include <AFMotor.h>AF_DCMotor motor1(1,MOTOR12_64KHZ);AF_DCMotor motor2(2,MOTOR12_64KHZ);intsleft = 52; //left bumper switchintsright = 53; //right bumper switchintlval; //left switch stateintrval; //right switch statevoid setup(){Serial.begin(9600);Serial.println("Here we go!");pinMode(sleft,INPUT);pinMode(sright,INPUT); motor1.setSpeed(255); motor2.setSpeed(255);digitalWrite(sleft,LOW);digitalWrite(sright,LOW);}void loop(){lval = digitalRead(sleft);rval = digitalRead(sright); while (lval == LOW,rval == LOW) { motor1.run(FORWARD); motor2.run(FORWARD); } • if (lval == LOW,rval == HIGH) { motor1.run(BACKWARD); motor2.run(BACKWARD); delay(1500); motor1.run(BACKWARD); motor2.run(FORWARD); delay(750); } if (lval == HIGH,rval == LOW) { motor1.run(BACKWARD); motor2.run(BACKWARD); delay(1500); motor2.run(BACKWARD); motor1.run(FORWARD); delay(750); } if (lval == HIGH,rval == HIGH) {Serial.print("WTF!!!"); delay(3000); motor1.run(BACKWARD); motor2.run(BACKWARD); delay(1500); motor1.run(BACKWARD); motor2.run(FORWARD); delay(2250); }}
System Details III • Scissor Lift • Metal framework that is able to move like several interconnected pairs of scissors in order to lift a platform. • This method will help the robot to move down the stairs.
System Details III • Kits • Vex Gear Kit • 12-, 36-, 60-, and 84-tooth gears • Vex Metal and Hardware Kit • Steel chassis, plates, bars, and gussets • Collars, shafts, bearings, and standoffs • Spacers, screws, nuts, and washers.
Suggestions For Future Development • Improving the scissor lift design so that the robot senses when the it touches the ground of the lower stairs. • Allowing the robot to detect and stop automatically on flat surfaces. • Improving the vacuum port design especially the roller brush so that it fits the stair treads.