projective
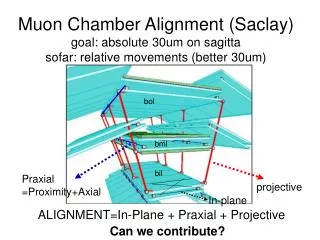
Muon Chamber Alignment (Saclay) goal: absolute 30um on sagitta sofar: relative movements (better 30um). bol. bml. bil. Praxial =Proximity+Axial. projective. In-plane. ALIGNMENT=In-Plane + Praxial + Projective. Can we contribute?. BOL and NIKHEF.

projective
E N D
Presentation Transcript
Muon Chamber Alignment (Saclay)goal: absolute 30um on sagittasofar: relative movements (better 30um) bol bml bil Praxial =Proximity+Axial projective In-plane ALIGNMENT=In-Plane + Praxial + Projective Can we contribute?
BOL and NIKHEF BOL (NIKHEF) 20um accurate, achieved!In-Plane x,y, scale, rotZ calibration to 20um effective (done, no direct proof) In-plane measures a lot. Most relevant: TORQUE (20urad) Can be studied in Cosmic ray stand (NOW, no global geometry needed) BIS BIS In addition: platforms for praxial and projective aligment glued (using Saclay tools)
Datcha@NIKHEF • In-Plane Torque can be measured between chamber pairs • Vertical alignment rays • on praxial platforms • Projective platforms are not tested here (nor elsewhere), which limits the ‘power’ of this setup wrt alignment!!!
A quick fit • Tracking with Cosray (efficiency, resolution + many studies needed, for example Tmax) • In-Plane (Torque) study • A few 100um check of praxial platforms + track sagitta’s (we have some ideas….) • Basic relative movements: possible, but done already years ago. • Get parameters out to tune ATLAS software! If we go for more: ASAP needed
ASAP • ROOT/C++ package • Nominal geometry: AMDB database • New Geometry from alignment + temp sensors • Uses Muonbox or Moore • Thinkable that this migrates to Athena
A ‘Quick-fit’ vs ASAP • Alignment=In-Plane+Praxial+Projective. Even with ASAP projective is not measured. So…. • ASAP is/was used in H8 Saclay responsibility. Why do it here? • Unlogical to go for alignment software, while we have experience with tracking reconstruction software. Get that in first. • Why use ASAP for stand at nikhef. Do it completely independently for H8 and get prepared for ATLAS!!! • Enough interesting stuff to do in cosmic ray stand without ASAP. • Get parameters out to tune ATLAS alignment software. Let Saclay develop this software. Note: this is my opinion + some statements to get discussion going