
圖 1. 自行車行駛操作程序圖
控制指令. 調整把手. 測量並傳送 車行位置. 車行路徑. 圖 1. 自行車行駛操作程序圖. 比較 控制. 圖 2. 自行車行駛方塊圖. 圖 3. 精餾塔頂 回饋 控制 系統圖. 冷凝器. 冷凝器. 塔頂產品. 回流量. 精餾塔. 溫度測量傳送器. 溫度控制器. 流量 溫度 濃度. 負載變數. 圖 4. 精餾塔頂溫度 回饋控制 方塊圖. 圖 5. 精餾塔頂 前饋 控制 系統圖. 塔頂產品. 冷凝器. 溫度記錄器. 回流量. 精餾塔. 精餾塔. 前饋控制器. 輸入溫度. 負荷變數. 前饋 控制器. 前饋 控制器. 前饋
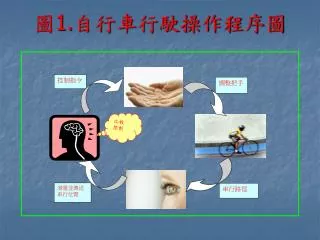

圖 1. 自行車行駛操作程序圖
E N D
Presentation Transcript
控制指令 調整把手 測量並傳送 車行位置 車行路徑 圖1.自行車行駛操作程序圖 比較 控制
圖3.精餾塔頂回饋控制系統圖 冷凝器 冷凝器 塔頂產品 回流量 精餾塔 溫度測量傳送器 溫度控制器 流量 溫度 濃度 負載變數
圖5.精餾塔頂前饋控制系統圖 塔頂產品 冷凝器 溫度記錄器 回流量 精餾塔 精餾塔 前饋控制器 輸入溫度
負荷變數 前饋 控制器 前饋 控制器 前饋 控制器 前饋 控制器 前饋 控制器 前饋 控制器 前饋 控制器 前饋 控制器 前饋 控制器 前饋 控制器 前饋 控制器 前饋 控制器 程序 + 穩定控制量 + 回流量 程序變數 + + 圖6.精餾塔頂溫度前饋控制方塊圖 負荷變數 負荷變數 負荷變數 負荷變數 負荷變數 負荷變數 負荷變數 負荷變數 負荷變數 負荷變數 負荷變數 程序 程序 程序 程序 程序 程序 程序 程序 程序 程序 + + + + + + + + + + + + + + + + + 回流量 回流量 回流量 回流量 回流量 回流量 回流量 程序變數 程序變數 程序變數 程序變數 程序變數 程序變數 程序變數 程序變數 程序變數
控制器參數之調整法則 • 反應曲線----最大斜率法
反應曲線法之參數調整法則 • 四分之一衰退比法
最小積分誤差準則 • 針對整個過程中誤差之積分做最小化 • 能使控制變數在最小的擺盪與最快的時間內達到設定點
針對設定點改變之最小積分誤差準則 誤差積分型態 IAE ITAE 控制器型態 = 0.758 0.586 PI = -0.861 -0.916 1.03 = 1.02 -0.165 = -0.323 0.965 PID = 1.086 -0.855 = -0.869 0.796 = 0.740 -0.147 = -0.130 0.308 = 0.348 0.9292 = 0.914