Download
1 / 24
240 likes | 741 Vues
Hybrid Specifications Can Be Converted Into Real-time Software And Tested: Token ... Automated cars. Unmanned air vehicles. Technologies. Wireless network ...

E N D
Slide 1:Designing an Automated Vehicle System
Raja Sengupta Assistant Professor Civil and Environment Engineering University of California, Berkeley
Slide 2:The System
http://www.path.berkeley.edu/CCIT_BART_Symposium/demo_97.wmv Click URL Below to View Media Clip
Slide 3:How does it work? Control
Distributed control Linear function of leader acceleration, speed, front vehicle position, acceleration, speed String Stable Cite: Hedrick, Swaroop etal
Slide 4:How does it work? Hardware
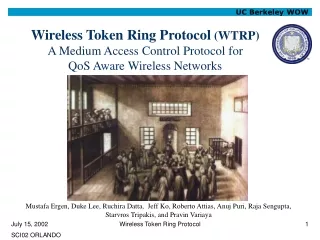
Slide 5:How does networking work? Our Wireless Token Ring Protocol
T Data T Data T Data A B C PS (A) = C NS (A) = B PS (C) = B NS (C) = A PS (B) = A NS (B) = C A Wireless Token Ring Protocol for Intelligent Transportation Systems. IEEE ITSC, August 25-29, 2001. Implemented on 802.11b WiFi
Slide 6:How does it work?
Feedback control design Methodology for an adaptive cruise control study using the SHIFT/Smart-AHS framework. IEEE SMC 1998. A method for design and specification of longitudinal controllers for vehicle automation, ITS America. 1998 Rear-end crash mitigation benefits of an automated highway system. SAE FTT�98. Supervisory logic and maneuver coordination design Distributed hybrid controls for automated vehicle lane changes. IEEE CDC 1998. Design of emergency manoeuvres for automated highway system: obstacle avoidance problem. IEEE CDC 1997 Monitoring system design Fault diagnosis for intra-platoon communications. IEEE CDC 1999. A methodology for the integration of vehicle failure diagnostics. ITS America 1998. Wireless Network design Tools for the design of fault management systems. IEEE ITSC 1997 Tools for safety analysis of vehicle automation systems. ACC 1997
Slide 7:Our Design Process
Prove the elements and their integration are correct whenever possible Correct: safe/fair/stable/optimal Usually done in models that leave out a lot of real world detail Simulate to learn more Use models that are closer to the real world Calibrated/validated. Experimental testing to learn still more Produce real-time software, put it on the hardware Ideally prototype production process should preserve all the properties Those proven, established by simulation, established experimentally This is difficult: Mars Rover, Three mile island, �. Established Techniques: Fault tree, root locus, hatley-pirby diagrams, �.. Research Techniques: Hybrid specification, analysis, code generation,�
Slide 8:Proving Correctness: The box example
Slide 10:Proving Correctness: The Box Example
Slide 11:Similar Correctness Proofs can be generated for cars: Automated Merge Example
Slide 12:The Logic And The Continuous Dynamics Are Brought Together In Hybrid Specifications
Slide 13:Proving Correctness of Hybrid Specifications
Typically safety is proved in a simplified generalization of the real world
Slide 14:Hybrid Specifications Can be Simulated: Does our control design reduce shockwaves?
The head vehicle A in the merge-in lane broadcasts a message to all main lane vehicles The Irrelevant vehicle B ignores the message The relevant vehicle C in the main lane brakes upon receipt of the message, making a proper gap in advance Vehicle A merges in after t seconds if he sees a �good� gap in the main lane, otherwise waits at merge-in point If the main lane traffic is dense, a queue is formed in the merge-in lane A B C Merge-in Point
Slide 15:Trajectories of Main Lane Vehicles:
ACC CACC
Slide 16:Hybrid Specifications Can Be Converted Into Real-time Software And Tested: Token Ring Protocol
Top level Teja Spec of the Token Ring Protocol
Rotation number Token Rotation Time 3 FTP FlowSlide 17:Token Ring Protocol: Test Data
Slide 18:Integrating Proofs, Simulation, and Software in the Prototype Development Process
Precision about these helps preserve proven, simulated, and tested properties in the prototype Syntax Semantics Environment (car, computer, �) Proofs/ mathematical meaning Code generation/ Compilation/ for Testing/ Simulation Approximates
Slide 19:An Example of Syntax and Semantics for Hybrid Specifications
Slide 21:Precision Enables Tools To Be Used To Maintain The Integrity Of Prototype Production
Syntax Semantics Environment (desktop computer) KRONOS, VeriSHIFT, Isabelle, MATLAB SHIFT, MATLAB
Slide 22:Precision Enables Tools To Be Used To Maintain The Integrity Of Prototype Production
Syntax Semantics Environment KRONOS, VeriSHIFT, Isabelle, MATLAB Teja, Real-time Workshop
Slide 23:Conclusions
Research in networked multi-vehicle systems Automated cars Unmanned air vehicles Technologies Wireless network design Distributed control design System safety and capacity design Use of design tools Hybrid specification, proofs, simulation, code generation Teaching CE 290I Control and Information Management Design and development of distributed real-time systems Study some part of BART?
Slide 24:Conclusions
Technical Advisor to ASTM Committee for Dedicated Short Range Communications on Vehicle-Vehicle Communications Current partnerships FHWA PATH/CALTRANS Daimler-Chrysler Research General Motors Research Honeywell National Science Foundation Office of Naval Research DARPA