Prostowniki
Prostowniki. Materiały pomocnicze do „Podstaw elektrotechniki i elektroniki” opracował: mgr inż. Andrzej Krieger . 1.Wstęp.

Prostowniki
E N D
Presentation Transcript
Prostowniki Materiały pomocnicze do „Podstaw elektrotechniki i elektroniki” opracował: mgr inż. Andrzej Krieger .
1.Wstęp. Doprowadzenie tych prądów zasilających warunkuje działanie układów , a ich postać i wartości powinny być optymalne dla zadanych warunków eksploatacyjnych .Trzeba podkreślić , że wszystkie zakłócenia w zasilaniu układów elektrycznych mogą bezpośrednio powodować zakłócenia w prawidłowym działaniu urządzeń elektrycznych i istotnie wpływać na ich niezawodność . Zadaniem układów zasilających , nazywanych skrótowo zasilaczami , jest przetwarzanie energii elektrycznej pobieranej ze źródeł pierwotnych ( sieć energetyczna jedno- lub trójfazowa , akumulator , baterie itp. ) na energię odpowiednich prądów , zasilających układy i urządzenia elektryczne.
Realizacja i metody projektowania zasilaczy należą szczególnie od poziomu mocy przetwarzanych .Kiedy moce te są znaczne ( rzędu kW i więcej ), stosuje się zazwyczaj wielofazowe sieci energii pierwotnej , złożone systemy zabezpieczeń , regulacji i chłodzenia oraz nakłada szczególnie wysokie wymagania w zakresie niezawodności działania . Zasilacze takie są obsługiwane przez wysoko kwalifikowanych pracowników i stanowią kosztowne , profesjonalne urządzenia i systemy. Natomiast do zasilania układów elektronicznych stosowanych w aparaturze elektronicznej masowego użytku , w aparaturze pomiarowo-kontrolnej , urządzeniach informatyki i automatycznej regulacji wystarczają zazwyczaj zasilacze stosunkowo proste i dostarczające mocy nie przekraczających setek watów . Zasilacze tego typu można zazwyczaj zestawić z typowych podzespołów ( np. specjalnych układów scalonych ) i projektować przy użyciu stosunkowo prostych metod przybliżonych . Najczęściej spotykanym rodzajem takich zasilaczy jest układ przetwarzający energię jednofazowego prądu przemiennego (50 Hz ) na energię prądu stałego .
Dla wypełnienia takiej funkcji w zasilaczu są stosowane zazwyczaj : transformator sieciowy z prostownikiem , filtr (pojedynczy lub złożony , bierny lub aktywny – tranzystorowy) oraz stabilizatory napięcia lub natężenia prądu ( zazwyczaj stałego ). Podzespoły te mogą mieć bardzo różne realizacje i w konsekwencji własności użytkowe.Cechą szczególną układów zasilających jest znaczne obniżenie energetyczne i napięciowe większości ich elementów . Z tego powodu przy projektowaniu i realizacji trzeba szczególną uwagę przywiązać do badania warunków krytycznych , wynikających z wahań obciążeń , napięcia sieci zasilającej , stanów przejściowych oraz zmian temperatury . Na przypomnienie zasługuje także związek niezawodności elementów i układów elektronicznych ze stopniem ich obciążenia energetycznego i napięciowego . Trzeba także podkreślić ogromną różnorodności rozwiązań i problemów związanych z optymalizacją zasilaczy . W takiej sytuacji rozważania , jakie zostaną przeprowadzone dalej , można traktować jedynie jako wprowadzenie do rozległej dziedziny układów zasilających o bogatej i wyspecjalizowanej literaturze .
3.Opis zasilaczy . Urządzenia dostarczające napięć i prądów o wymaganych wartościach do zasilania wszelkiego rodzaju obwodów odbiorczych , nadawczych , elektroakustycznych , pomiarowo – kontrolnych oraz automatyki nazywamy zasilaczami. Schemat blokowy układu zasilania pobierających energię z sieci energetycznej. Układ zasilania sieciowego zawiera układy prostownicze , w których energia prądu przemiennego zostaje przekształcona w energię prądu stałego , układy filtrujące obniżające zawartość tętnień o częstotliwości sieci w napięciach wyprostowanych oraz ewentualne układy stabilizujące napięcia wyprostowane od zmian napięcia sieci i zmian obciążenia .
Rys.3.1 Schemat blokowy układu zasilania pobierających energię z sieci energetycznej zasilania za pośrednictwem transformatora .
W niektórych przypadkach na napięcie sieci mogą być nałożone szkodliwe sygnały zakłócające .W celu ograniczenia wpływu tych sygnałów na pracę urządzenia w obwodach sieciowych układów zasilania należy umieszczać filtry zaporowe . Wymagania dotyczące układów prostowniczych są bardzo zróżnicowane w zależności od rodzaju urządzenia zasilanego , od rodzaju elementów czynnych , które zastosowano w urządzeniu zasilanym , oraz od koncepcji rozwiązania układu zasilania w urządzeniu ( np. układy prostownicze z jednym lub kilkoma prostownikami ). Wartości napięć wyprostowanych zawierają się w granicach kilku lub kilkunastu woltów dla urządzeń tranzystorowych i wykorzystujących układy scalone do kilkuset woltów dla urządzeń lampowych . Wartości prądów dostarczane przez prostowniki obejmują przedział od kilku miliamperów do kilku amperów . Oprócz spełniania wymagani prądowo – napięciowych poprawnie rozwiązany układ prostujący powinien charakteryzować się dużą sprawnością , niewielką rezystancją wewnętrzną , szerokim zakresem temperatury pracy i niewielkimi rozmiarami .
Mała sprawność elementu prostowniczego lub całego układu prostującego powoduje występowanie bezużytecznych strat mocy , która ponadto podnosi temperaturę wewnątrz zasilanego urządzenia .Wymagania małej rezystancji wewnętrznej wynikają z konieczności uzyskania stałego napięcia wyprostowanego przy zmianach obciążenia . Warunek odporności na wysokie temperatury jest związany ze znacznym ogrzewaniem z wnętrza urządzenia przez niektóre elementy i podzespoły układów funkcjonalnych . Wymagania dotyczące niewielkich rozmiarów wynika z tendencji do zmniejszania objętości zajmowanej przez układy elektroniczne zasilanego urządzenia . W urządzeniach starszego typu do prostowania napięci sieciowych stosowano początkowo prostownicze lampy próżniowe . W miarę rozwoju techniki półprzewodnikowej lampy próżniowe były kolejno zastępowane przez prostowniki selenowe , diody germanowe i diody krzemowe . W nowoczesnych urządzeniach do prostowania napięć sieciowych są stosowane wyłącznie diody krzemowe , obecnie coraz częściej szczególnie w sprzęcie telewizyjnym – krzemowe diody sterowane , zwane tyrystorami.
4. Elementy składowe zasilaczy . • 4.1 Prostowniki, • Prostowniki są podzespołami zasilaczy , które przetwarzają prąd zmienny na prąd jednokierunkowy . Jest więc pożądane , aby ich sprawność energetyczna była możliwie duża . • Gdzie : Po- moc składowej stałej w obciążeniu prostownika , • P– moc czynna pobierana z sieci energetycznej • ( pierwotnego źródła energii ) . • W praktyce ,przy mocach zasilania kilkanaście – kilkadziesiąt watów , parametr ten nie ma zwykle decydującego znaczenia . • Natomiast żąda się od prostownika możliwie dużej skuteczności prostowania
gdzie :U0 – składowa stała napięcia na obciążeniu , U~ – amplituda składowej zmiennej napięcia na wejściu prostownika ( za transformatorem ) . Tak zdefiniowana skuteczność jest zależna od składowej stałej prądu obciążenia . Graficznym obrazem tej zależności jest tzw. charakterystyka obciążenia prostownika , pokazana przykładowo na rys . 4.2 . Widać z tego rysunku , że wrażliwość skuteczności prostownika na zmiany prądu obciążenia można w różnych rodzajach prostowników , a ponadto przy ustalonym typie prostownika inna przy małych wartościach prądu ( większa ) aniżeli przy wartościach dużych zmniejszenie napięcia wyprostowanego przy wartości prądu obciążenia może być także zinterpretowane w postaci rezystancji wyjściowej prostownika . • W praktyce ,przy mocach zasilania kilkanaście – kilkadziesiąt watów , parametr ten nie ma zwykle decydującego znaczenia . • Natomiast żąda się od prostownika możliwie dużej skuteczności prostowania
Widać , że tak zdefiniowana rezystancja może w znacznym stopniu zależeć nie tylko od rodzaju prostownika , ale także od wartości prądu , pobieranego do obciążenia . Ogromna większość układów elektronicznych wymaga , zasilania napięciem stałym bez towarzyszących tętnień czy innych składowych zakłócających . Stąd ważnym parametrem prostownika jest poziom tętnień na jego wyjściu przy danym obciążeniu .Najczęściej stosowany jest współczynnik tętnień , zdefiniowany zależnością Jej miarą jest stosunek ubytku napięcia do przyrostu prądu obciążenia gdzie:A; B jak na rys .4. 2. • Rys. 4.2 . Przykładowe charakterystyki obciążenia prostowników ( P1 ; P2 ). W większości prostowników współczynnik tętnień wyraźnie zależy od prądu obciążenia , przy czym możliwe są sytuacje przedstawione na rys . 4.3. Z tego punktu widzenia prostownik P2 byłby korzystny przy małych prądach , natomiast prostownik P3 – przy prądach stosunkowo dużych . • gdzie : - amplituda dominującej składowej zmiennej na wyjściu prostownika , o pulsacji m (dla m – fazowego prostownika zasilanego z sieci prądu zmiennego o pulsacji ) • - składowa stała napięcia na wyjściu prostownika
Ze związków tych wynikają przede wszystkim wymagania stosowane diodom oraz tyrystorom . Przykładowo : stosunki maksymalnych wartości chwilowych prądu do składowej stałej prądu obciążenia lub stosunki maksymalnego napięcia wstecznego na elemencie prostowniczym do składowej stałej napięcia na obciążeniu będą zależeć zarówno od struktury prostownika , jak też wartości pojemności i indukcyjności odpowiednich elementów składowych . W przypadku asymetrii prostownika( np. dwupołówkowego lub mostkowego ) mogą pojawić się na wyjściu składowe o pulsacji , ale zazwyczaj ich amplituda jest nieznaczna. Charakterystyką oznaczoną symbolem P2 otrzymuje się przy prostownikach z obciążeniem pojemnościowych , natomiast oznaczoną symbolem P3 przy prostownikach z obciążeniem indukcyjnym . Charakterystyce P1 odpowjadają prostowniki z obciążeniem rzeczywistym Wartości chwilowe prądów i napięć mogą osiągać szczególnie duże wartości w stanach przejściowych pracy prostownika , powstających przy nagłych zmianach obciążeniach lub amplitudy napięcia zasilanego . • Rys . 4.3 .Przykłady zależności współczynnika tętnień t od prądu obciążenia • Poza tymi parametrami każdy prostownik charakteryzują określone związki pomiędzy prądami i napięciami na jego zaciskach zewnętrznych a prądami i napięciami na elementach prostowniczych .
4.2. Budowa i działanie prostownika. Element ten charakteryzuje się znaczną asymetrią rezystancji, zależną od kierunku przepływu prądu elektrycznego. Rezystancja zaworu w kierunku przewodzenia jest mała, a w kierunku zaporowym – duża. We współczesnych urządzeniach elektronicznych zaworem elektrycznym najczęściej jest dioda półprzewodnikowa (element niesterowalny ), lecz może nim być także tyrystor (element sterowany ) lub lampa elektronowa. • Prostownik jest to urządzenie przekształcające prąd rzemienny w prąd jednokierunkowy stały. Podstawowym elementem prostownika jest zawór elektryczny.
Rys.4.4. Schemat i charakterystyka prostownika: a) jednopołówkowego Przedstawia schemat icharakterystykę prostownika jednopołówkowego, b) dwupołówkowego. przedstawia schemat i charakterystykę prostownika dwupołówkowego.
a) bez filtra, Charakterystyki układu prostowniczego jednopołówkowego z zastosowaniem filtrów:
Charakterystyki układu prostowniczego dwupołówkowego z zastosowaniem filtrów: a) bez filtra,
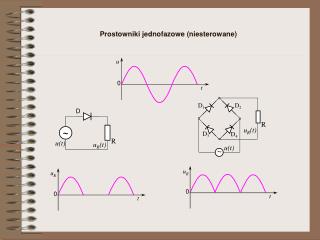
Przyjmując, że dioda jest elementem idealnym, otrzymuje się w tym prostowniku przebiegi czasowe napięć takie jak rys. 4.4.a. W pierwszej, dodatniej połowie okresu napięcia sieci dioda przewodzi, gdyż biegunowość napięcia zasilania jest zgodna z polaryzacją diody w kierunku przewodzenia, zatem przez obciążenie płynie prąd. Ponieważ spadek napięcia w kierunku przewodzenia na idealnej diodzie jest równy zeru, zatem całe napięcie zasilania występuje na rezystorze R. W drugiej, ujemnej połowie okresu napięcia zasilania, dioda nie przewodzi, gdyż biegunowość napięcia zasilania jest zgodna z polaryzacją diody w kierunku zaporowym. Wobec tego prąd w obwodzie nie płynie, a cały spadek napiecia zasilania odkłada się na diodzie. Łatwo można zauważyć, że prąd obciążenia płynie tylko w czasie jednej połowy okresu napięcia zasilania, dlatego też taki prostownik nazywa się prostownikiem jednopołówkowym. Gdy amplituda napięcia wejściowego jest mała trzeba uwzględnić również napięcie progowe diody. Współczynnik tętnień napięciowych prostownika półokresowego jest duży, a sprawność mała. Warunki pracy transformatora w tym przypadku nie są dobre, ponieważ składowa stała prądu wpływa negatywnie na transformator.
Znacznie lepsze właściwości mają prostowniki dwupołówkowe (pełnookresowe). Schemat prostownika dwupołówkowego przedstawia rys. 4.4.b.. Dwie diody D1 i D2 tworzą dwa prostowniki półokresowe połączone tak, że przewodząc na przemian w kolejnych półokresach napięcia zasilania dostarczają do obciążenia prądy I1 i I2 , których suma składa się nawypadkowy prąd IR prostownika. Porównując ten układ z prostownikiem półokresowym doszedłem do wniosku, że w prostowniku pełno okresowym współczynnik tętnień napięciowych jest 2 – krotnie mniejszy, a wartość średnia napięcia i prądu obciążenia jest 2 – krotnie większa. Niestety niewątpliwą wadą tego prostownika jest to, że również 2 – krotnie zwiększa się szczytowe napięcie wsteczne diody nieprzewodzącej. W tym układzie warunki pracy transformatora też są niekorzystne , gdyż przez transformator również płynie prąd stały. Straty w rdzeniu istnieją jednak transformator pracuje trochę w lepszych warunkach.
Zaletami prostownika mostkowego są : Możliwość stosowania transformatora bez wyprowadzenia środkowego, nie pojawia się stały strumień magnetyczny w transformatorze wytwarzający składową prądu , szczytowe napięcie wsteczne na każdej diodzie jest 2 – krotnie mniejsze niż w przypadku prostownika z rys. 4.4. Można zauważyć, że podając napięcie ok. 1V pojedyncza dioda przewodzi duży prąd. Chcąc uzyskać większe prądy przy dość małym napięciu należałoby połączyć kilka diod równolegle. Przy tym samym napięciu prąd płynący przez jedną diodę jest mniejszy niż prąd płynący przez co najmniej dwie diody. • Najczęściej stosowanym w praktyce prostownikiem jest prostownik pełno okresowy mostkowy ( w układzie GRAETZA ), rys.4.5. W układzie tym zastosowano cztery diody połączone tak, że zawsze dwie są w stanie przewodzenia, a pozostałe dwie są w stanie nie przewodzenia. W obu półokresach prąd płynący przez obciążenie ma taki sam kierunek .
Rys. 4.5. Układ prostowniczy dwupołówkowy z mostkiem: a) schemat układu; b) przebieg napięcia; c) przebieg prądu obciążenia; d) przebieg napięcia na obciążeniu.
Charakterystyki układu prostowniczegodwupołówkowego z mostkiem z zastosowaniem filtrów: a) bez filtra,
e) cewka i kondensator, • Przy konstruowaniu prostowników należy zwrócić uwagę na parametry elementów prostowniczych. Przy stosowaniu diod prostowniczych należy uwzględnić główne parametry diod jak np. napięcie progowe, napięcie przebicia, wsteczny prąd nasycenia, maksymalny prąd przewodzenia diody, maksymalna moc strat wydzielona na diodzie.
4.3. Parametry prostowników. Są nimi: wartość średnia prądu i napięcia (I0, U0), wartość skuteczna prądu i napięcia (I, U), częstotliwość tętnień (ft), współczynnik tętnień (kt), współczynnik sprawności prostownika (kp), • Parametry prostownika służą do oceny jakości prostownika.
Wartość średnia prądu i napięcia. Wartość średnią przebiegu (napięcia) zmiennego nazywa się średnia arytmetyczną bezwzględnych tego przebiegu w ciągu jednego okresu • gdzie : • Um- wartość maksymalna napięcia . • Im- wartość maksymalna prądu.
Wartość skuteczna prądu i napięcia: Wartość skuteczną prądu przemiennego wyraża się umowną wartość prądu stałego, Który płynąc w obwodzie o stałej wartości oporu elektrycznego wytworzy taką samą energię jak dany prąd przemienny płynący w tym samym czasie.
kt=1.21 Współczynnik sprawności prostownika. Współczynnik sprawności prostownika jest to stosunek mocy użytej uzyskanej na odbiorniku do mocy wejściowej prądu zmiennego: Kp=0.4 • Współczynnik tętnień: • Współczynnikiem tętnień prostownika nazywamy stosunek wartości skutecznej składowej zmiennej napięcia na wyjściu prostownika (U) do wartości składowej stałej na tym wyjściu (U0).
4.4 Filtry. Poziomy tętnień uzyskane na wyjściu prostowników są często zbyt duże dla prawidłowej pracy zasilanych układów elektronicznych. Z tego powodu pomiędzy prostownik a zasilane układy ( obciążenia włączamy – w sposób pokazany na rys. 4.6 – odpowiednie filtry dolnoprzepustowe , dostosowane do przepuszczania składowych stałych o określonych napięciach i natężeniach .
Rys. 4.6 .Filtr jako element układu zasilającego. • Podstawowym parametrem filtru jest zatem współczynnik filtracji q
Inną ważną cechą filtru jest niezawodność jego działania. Jest to problem często niedoceniany przez konstruktorów aparatury elektronicznej , a dość krytyczny z powodu przenoszenia prądów o znacznych wartościach przy ograniczonych i minimalizowanych wymiarach i masie elementów składowych filtru . Warto podkreślić , że stosowane w takich filtrach kondensatory elektrolityczne mogą być znacznie nagrzewane wskutek stratności i przepływu dużych prądów tętnień , co zasadniczo powiększa prawdopodobieństwo ich uszkodzenia . Najprostszą realizacją filtru są układy bierne LC lub RC – pokazane przykładowo na rys. 4.7. • Wymagane wartości liczbowe tego parametru zależą od rodzaju zasilanego układu oraz parametrów prostownika i zawierają się zwykle w przedziale od kilkunastu do kilkunastu tysięcy . Od filtru wymagane są także możliwie małe spadki wartości składowych napięcia . Stąd drugim parametrem filtru jest jego sprawność napięcia • zazwyczaj zawarta w przedziale ( 0,3 – 0,9 ) . Natomiast za wypadkową miar jakości filtru uważa się iloczyn wyżej wymienionych parametrów
Filtr RC stosuje się przy małych wartościach prądów ( ), dobierając zazwyczaj rezystancję tak , by łączny spadek stałej spełniał warunek . Filtry LC ( rys.4.7.d. i 4.7.e.) stosuje się przy obciążeniach średnich ( do kilkuset mA ) , natomiast gdy prądy osiągają wartości amperów , zazwyczaj ograniczamy się do szeregowego dławika ( filtr z rys. 4.7.d ) przy C = 0. W niektórych napięcia składowej przypadkach stosuje się także filtry ( LC + RC ) – jak na rys. 4.7.f – szczególnie kiedy poziomy tętnień i pobieranych prądów są znacznie zróżnicowane . projektowanie takich filtrów jest w zasadzie proste Żądamy zwykle by zachodziły zależności Rys.4.7.Przykłady filtrów biernych • pozwala dla katalogowych wartości pojemności ( zwykle dziesiątki – setki F) ustalić pozostałe parametry na podstawie wymaganej wartości współczynnika filtracji q .
Rys. 4.8. Przebieg funkcji ( q ,n ) • Jeśli jednak obciążenie filtru ulega szybkiemu wahaniu w czasie ( np. układy modulowane lub manipulowane , inne układy sterowane dużymi sygnałami ) wówczas istotną rolę zaczynają odgrywać stany przejściowe w filtrze . W przypadku filtrów LC pojawiają się wówczas złożone oscylacje , mogące prowadzić do zakłóceń w pracy zasilanego układu , a nawet uszkodzenia filtru w wyniku przejściowo powstających przepięć i przetężeń . • Wreszcie dość złożona może być optymalizacja filtru pod kątem uzyskania minimalnej masy jego elementów , a nawet minimalnego iloczynu sumy ; pojemności i indukcyjności . Przykładowo , przyjmując strukturę ogniwa filtru jak na rys. 4.7.d stwierdzimy że przy n jednakowych ogniwach połączonych kaskadowo
gdzie : zmiany (q , n) są pokazane na rys . 4.8 . Wśród filtrów biernych spotkamy czasami układy bardziej złożone , w szczególności pokazane na rys . 4.9. Filtry z rys . 4.9.a i 4.9.b należą do grupy filtrów rezonansowych , wykorzystujących własności odpowiednich obwodów rezonansowych LC do strumienia dominującej składowej tętnień ( czy zakłóceń ). Oczywistą wadą takich filtrów jest ich wrażliwość na zmiany częstotliwości tętnień , jakie mogą powstać wskutek wahań częstotliwości w sieci energetycznej . Filtry z rys . 4.9.c i 4.9.d należą do grupy filtrów z kompensacją . Przy ustalonym obciążeniu ( - constanst ) można w nich dobrać tak parametry L ,C , R aby uzyskać współczynnik filtracji q znacznie większy aniżeli w układach prostych , o identycznych wartościach . Ogólnie można stwierdzić , że filtry bierne odznaczają się prostotą , niezawodnością działania , stosunkowo dużą sprawnością ( która – dodatkowo nieznacznie zależy od temperatury ).
Natomiast ich wadami są : znaczne gabaryty i koszty elementów , niekorzystne stany przejściowe ( w filtrach LC ) oraz wzrost impedancji wyjściowej od strony wyjścia filtru przy zmniejszeniu pulsacji . Przeciwnie wyglądają własności filtrów aktywnych , wykorzystujących elementy stosowane do tłumienia tętnień i zakłóceń. Istnieje duża różnorodność układów takich filtrów . Przykładem pierwszej grupy tzw. filtrów kolektorowych może być układ pokazany na rys. 4.10.a . • Rys. 4.9.Przykłady filtrów złożonych .
Zauważmy , że układy z rys. 4.10.a można narysować w postaci pokazanej na rys. 4.10.b . Tętnienia na wejściu filtru powodują powstanie składowych zmiennych w napięciach oraz . Jednakże poziomy przebieg charakterystyk kolektorowych tranzystora pozwala pominąć wpływ tętnień napięcia kolektorowego na składową zmienną prądu kolektora , co prowadzi do przybliżonego układu pracy takiego filtru , pokazano na rys. 4.10.c. W celu powiększenia współczynnika filtracji trzeba powiększać pojemność ( co może prowadzić do niekorzystnych stanów przejściowych ) albo stosować układy bardziej rozbudowane – jak przykładowo pokazano na rys. 4.10.d. Ogólnie o filtrach tej grupy można powiedzieć , że włączenie opornika powoduje stosunkowo małą sprawność energetyczną ( ok. 60 % ) , a ponadto impedancji wyjściowa jest praktycznie równa reaktancji kondensatora , a więc jest dość znaczna przy małych częstotliwościach .Filtry takie cechuje także znaczna wrażliwość na zmiany temperatury , prowadząca w szczególności do zależności składowej stałej napięcia od . • Rys.4.10 przykłady filtrów kolektorowych ( a i b ) oraz ilustracje do analizy • filtru z rys. a ( rys b i c).
Inną grupą filtrów – tzw. emiterowych przedstawia rys. 4.11. Najprostszy z nich , przedstawiony na rys . 4.11.a , można także narysować jak na rys . 4.11.b . Przeprowadzając analogiczne rozumowanie jak w przypadku filtru kolektorowego możemy narysować przybliżony układ pracy takiego filtru ( rys. 4.11.c ) . Przyjmując założenie możemy napisać Stąd przybliżona wartość współczynnika filtracji
Z rysunku 4.11.b widać , że rezystancja obciążenia jest w układzie zasilania poprzez wtórnik emiterowy .Wynikają stąd istotne zalety takich filtrów , a mianowicie : mała rezystancja wyjściowa , mała wrażliwość na zmiany temperatury i wymianę egzemplarza tranzystora ( silne sprzężenie zwrotne ) , stosunkowo duża sprawność (do ok. 80 % ). Aby zatem usunąć pewną wadę takich filtrów , jaką jest niewielki współczynnik filtracji stosuje się dwuogniowy filtr RC , sterujący bazą ( rys. 4.11.d ) dwójniki z pomocniczym tranzystorem T2 o dużej rezystancji dla składowych zmiennych ( rys. 4.11.c ) i ewentualnie zastępuje kondensator w filtrze sterującym bazą odpowiednią diodą Zenera ( rys. 4.11. f ) . • Rys. 4.11 Przykłady filtrów emiterowych oraz ilustacje ( 4.11.b i 4.11.c) do analizy filtru z rys . 4.11.a .
Transformatorem nazywamy aparat służący do zmiany prądu przemiennego o jednym napięciu na prąd przemienny o innym napięciu . Transformator w swej najprostszej postaci składa się z zamkniętego rdzenia , wykonanego z pasów blachy transformatorowej jednostronnie izolowanej odpowiednio nakrzemionej o grubości od 0,35 mm do 0,5 mm , odizolowanych do siebie bibułą lub lakierem izolacyjnym . Blachytransformatora pakietuje się : na styk , na zakładkę i zaplecenie prostokątne . Przekrój poprzeczny kolumny może być kwadratowy , krzyżowy lub wielo schodkowy , przy czym cewki nakładane na kolumny mają kształt kołowy . Uzwojenie pierwotne i wtórne każdej fazy umieszcza się tych samych kolumnach , w celu powiększenia sprzężenia magnetycznego uzwojeń przez powiększenie współczynnika indukcji wzajemnej oraz w celu zmniejszenia spadku napięcia indukcyjnego . Strumienie rozproszenia , jako pochodzące od prądów przeciwnie skierowanych , również są skierowane przeciwnie i dlatego częściowo cię znoszą ; pozostają zaś tylko te , które zamykają się dookoła poszczególnych cewek . 4.5 Transformatory
Rozróżniamy dwa rodzaje cewek transformatorowych , cylindryczne i krążkowe . Przy uzwojeniach cylindrycznych uzwojenie wyższego napięcia znajduje się zazwyczaj na zewnątrz , zaś niższego wewnątrz , z tego względu , że niższe napięcie łatwiej jest odizolować od rdzenia żelaznego . Przy uzwojeniach krążkowych oba uzwojenia każdej fazy rozdziela się na szereg cewek , przy czym cewki mogą być ze połączone szeregowo lub równolegle . Na zewnątrz przy jarzmach umieszcza się cewki należące do niższego napięcia , ze względu na łatwiejsze ich odizolowanie od żelaza , przy czym jedna z cewek niższego napięcia dzieli się na połowy , aby było ich o jedną więcej niż cewek wyższego napięcia . W ten sposób wszystkie cewki wysokiego napięcia znajdują się wewnątrz cewki niższego napięcia .
5. Układy prostownicze. Najprostszy prostownik półfalowy (jednopołówkowy), jednofazowy z obciążeniem rezystancyjnym (rys 4.1a) stanowi dioda D włączona w szereg z rezystorem R0. Dioda ta przewodzi, gdy napięcie na niej jest dodatnie, przy założeniu, że dioda jest idealna (RF = 0, RR = ). Jeżeli napięcie zasilające jest sinusoidalne (u2 = U2msin t, gdzie U2m =2, U2 –wartość maksymalna napięcia, = 2f – pulsacja), to prąd płynie przez obciążenie tylko przez pół okresu tego napięcia (rys 4.1b) • 5.1. Analiza pracy układu prostownika jednopołówkowego • jednofazowego z obciążeniem rezystancyjnym.