Contention-Aware Scheduling with Task Duplication in Parallel Computing Systems
This paper explores contention-aware scheduling by introducing task duplication to optimize performance in parallel computing environments. It discusses the fundamental principles of task scheduling, including directed acyclic graphs (DAGs) and classical scheduling methods, before proposing a more realistic model that considers communication costs. The authors analyze the complexity of their proposed techniques, presenting experimental evaluations that demonstrate the advantages of task duplication when accounting for contention. Results indicate that task duplication significantly improves scheduling efficiency, especially in restricted network scenarios.

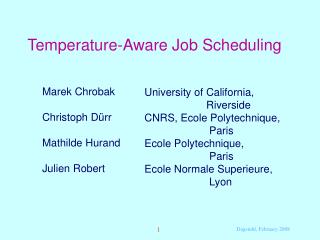
Contention-Aware Scheduling with Task Duplication in Parallel Computing Systems
E N D
Presentation Transcript
Contention-aware scheduling with task duplication J. Parallel Distrib. Comput. (2011) Oliver Sinnen ∗, Andrea To, ManpreetKaur Tai, Yu-Chang 11/23/2012
Outline • Introduction • Task scheduling background • Classic scheduling • Contention-aware scheduling • Complexity analyze • Experimental evaluation • Conclusions
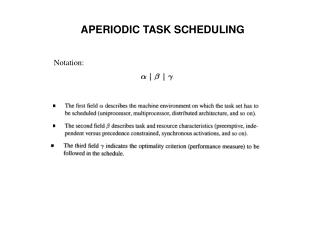
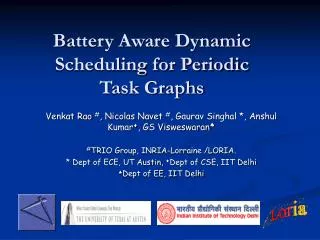
Task scheduling background • Directed acyclic graph (DAG) G = (V, E,w, c),called a task graph nodes n ∈ V : tasks edge eij∈ E: communication from nito nj w(n): n’scomputation cost c(eij): communication cost of edge eij ∈ E
Task scheduling background • set P • ts(n, P) :start time of n on processor P ∈ P • tf(n, P) :finish time of n on processor P ∈ P tf(n, P) = ts(n, P) + w(n) • proc(n) • tf (P) = maxn∈V:proc(n)=P{tf (n, P)} • sl(&) = maxn∈V{tf(n, proc(n))} • tf (eij, Psrc, Pdst)
Task scheduling background • pred(ni) • succ(ni) • pred(n) = ∅ (source node) • succ(n) = ∅ (sink node)
Two conditions must be fulfilled Two Constraint • (1) • (2) (3) (4) if pred(n) = ∅ (n is source node) tdr(n) =tdr(n, P) = 0, for all P ∈ P
Technique used • Insertion technique max{A, tdr(n, P)} + w(n) ≤ B - A free node can be scheduled on processor P within the idle time interval [A, B], A, B ∈ [0,∞], i.e. an interval in which no task is executed • End technique [A, B] = [tf (P),∞].
Classic model • Traditionally, most scheduling algorithms have employed astrongly idealised model of the target parallel system,calledthe classic model • properties: (i) local communication has zero costs (ii) communication is performed by a communication subsystem (iii) communication can be performed concurrently (iv) The communication network is fully connected • Edge Finish Time
List scheduling • Using either the insertion or the end technique • ts(n, P) = max{A, tdr(n, P)} • tf (n, P) = ts(n, P) + w(n)
List scheduling 13 13 3 2 3 2 A B C D E F
List scheduling with dupication • (2)become • (3)become exemple
Contention Model • To make task scheduling contention aware(more realistic) The awareness for contention is achieved by edge scheduling • properties: (i) local communication has zero costs (ii) communication is performed by a communication subsystem X (iii) communication can be performed concurrently X (iv) The communication network is fully connected • Edge Finish Time
Contention-aware scheduling with task duplication exemple A C B D E
Complexity analyze O(VlogV+E) O(|P||V|*Algo3) O(V) O(P) O(1)
O(P*E) O(V) Insertion technique O(P) O(E) O(routing) O(E) O(|P||V||E|2 (routing)) O(1)
Complexity analyze • O( |P|2 |V|2 |E|2 (routing) ) • Be aware that this is the worst-case complexity, which should be significantly higher than the expected average case complexity in this case • For comparison , the second part of a contention-aware list scheduling with the insertion technique is O(|V|2 + |P| |E| 2 (routing))
Experimental evaluation LS LS-CS CA-LS D D-CS CA-D
Experimental evaluation full-duplexhalf-duplex
4 4 4 2 3 2 2 1 1 3 3 1 • vs • vs 4 4 3 3 4 2 2 1 1 3 1 2 CA-D D-CS CA-D CA-LS
4 4 2 3 2 1 3 1 4 4 3 2 1 3 1 2
Conclusions • Duplication under the contention model is significantly better than under the classic model • Task duplication is even more beneficial under the contention model than under the classic model , and this effect increases for more restricted networks • The algorithm was proposed based on state-of-the-art scheduling techniques found in task duplication algorithms and other contention-aware algorithms