Understanding Rotational Motion: The Dynamics and Equilibrium
1.32k likes | 1.48k Vues
Explore rotational motion, torque impact, stability factors, and forces. Calculate displacement, velocity, acceleration. Study Earth's examples of rotation. Measure angular velocity and acceleration. Solve problems in rotational dynamics.

Understanding Rotational Motion: The Dynamics and Equilibrium
E N D
Presentation Transcript
Chapter 8: Rotational Motion Click the mouse or press the spacebar to continue.
In this chapter you will: • Learn how to describe and measure rotational motion. • Learn how torque changes rotational velocity. • Explore factors that determine the stability of an object. • Learn the nature of centrifugal and Coriolis “forces.” Chapter Introduction
Chapter 8: Rotational Motion Section 8.1:Describing Rotational Motion Section 8.2:Rotational Dynamics Section 8.3:Equilibrium Chapter Menu
In this section you will: • Describe angular displacement. • Calculate angular velocity. • Calculate angular acceleration. • Solve problems involving rotational motion. Section 8.1-1
A grad is of a revolution. A degree is of a revolution. Describing Rotational Motion A fraction of one revolution can be measured in grads, degrees, or radians. Section 8.1-2
The radian is defined as of a revolution. Describing Rotational Motion One complete revolution is equal to 2radians. The abbreviation of radian is ‘rad’. Section 8.1-3
Angular Displacement The Greek letter theta, θ, is used to represent the angle of revolution. The counterclockwise rotation is designated as positive, while clockwise is negative. Section 8.1-4
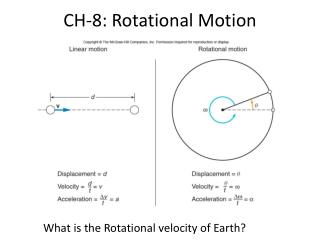
Angular Displacement As an object rotates, the change in the angle is called angular displacement. For rotation through an angle, θ, a point at a distance, r, from the center moves a distance given by d = rθ. Section 8.1-5
Angular Velocity Velocity is displacement divided by the time taken to make the displacement. The angular velocity of an object is angular displacement divided by the time required to make the displacement. Section 8.1-6
Angular Velocity The angular velocity of an object is given by: Here angular velocity is represented by the Greek letter omega, ω. The angular velocity is equal to the angular displacement divided by the time required to make the rotation. Section 8.1-7
Angular Velocity If the velocity changes over a time interval, the average velocity is not equal to the instantaneous velocity at any given instant. Similarly, the angular velocity calculated in this way is actually the average angular velocity over a time interval, t. Instantaneous angular velocity is equal to the slope of a graph of angular position versus time. Section 8.1-8
Angular Velocity Angular velocity is measured in rad/s. For Earth, ωE = (2πrad)/[(24.0 h)(3600 s/h)] = 7.27×10─5 rad/s. Section 8.1-9
Angular Velocity In the same way that counterclockwise rotation produces positive angular displacement, it also results in positive angular velocity. If an object’s angular velocity is ω, then the linear velocity of a point at distance, r, from the axis of rotation is given by v = rω. The speed at which an object on Earth’s equator moves as a result of Earth’s rotation is given by v =r ω = (6.38×106 m) (7.27×10─5 rad/s) = 464 m/s. Section 8.1-10
Angular Velocity Earth is an example of a rotating, rigid object. Even though different points on Earth rotate different distances in each revolution, all points rotate through the same angle. The Sun, on the other hand, is not a rigid body. Different parts of the Sun rotate at different rates. Section 8.1-11
Angular Acceleration Angular acceleration is defined as the change in angular velocity divided by the time required to make that change. The angular acceleration, α, is represented by the following equation: Section 8.1-12
Angular Acceleration Angular acceleration is measured in rad/s2. If the change in angular velocity is positive, then the angular acceleration is also positive. Angular acceleration defined in this way is also the average angular acceleration over the time interval Δt. Section 8.1-13
Angular Acceleration One way to find the instantaneous angular acceleration is to find the slope of a graph of angular velocity as a function of time. The linear acceleration of a point at a distance, r, from the axis of an object with angular acceleration, α, is given by a = r. Section 8.1-14
Angular Acceleration A summary of linear and angular relationships. Section 8.1-15
Angular Frequency A rotating object can make many revolutions in a given amount of time. The number of complete revolutions made by the object in 1 s is called angular frequency. Angular frequency, f, is given by the equation, Section 8.1-16
A. B. C. D. Question 1 What is the angular velocity of the second hand of a clock? Section 8.1-17
Answer 1 Reason:Angular velocity is equal to the angular displacement divided by the time required to complete one rotation. Section 8.1-18
Answer 1 Reason:In one minute, the second hand of a clock completes one rotation. Therefore, = 2π rad. Therefore, Section 8.1-18
Question 2 When a machine is switched on, the angular velocity of the motor increases by a total of 10 rad/s for the first 10 seconds before it starts rotating with full speed. What is the angular acceleration of the machine in the first 10 seconds? A. rad/s2 B.1 rad/s2 C. 100 rad/s2 D. 100 rad/s2 Section 8.1-19
Answer 2 Reason:Angular acceleration is equal to the change in angular velocity divided by the time required to make that change. Section 8.1-20
Question 3 When a fan performing 10 revolutions per second is switched off, it comes to rest after 10 seconds. Calculate the magnitude of the average angular acceleration of the fan after it was switched off. A. 1 rad/s2 B. 2 rad/s2 C. rad/s2 D. 10 rad/s2 Section 8.1-21
Answer 3 Reason:Angular displacement of any rotating object in one revolution is 2 rad. Since the fan is performing 10 revolutions per second, its angular velocity = 2×10 = 20 rad/s. Section 8.1-22
Answer 3 Reason:Angular acceleration is equal to the change in angular velocity divided by the time required to make that change. Section 8.1-22
In this section you will: • Describe torque and the factors that determine it. • Calculate net torque. • Calculate the moment of inertia. Section 8.2-1
Rotational Dynamics The change in angular velocity depends on the magnitude of the force, the distance from the axis to the point where the force is exerted, and the direction of the force. Section 8.2-2
Rotational Dynamics To swing open a door, you exert a force. The doorknob is near the outer edge of the door. You exert the force on the doorknob at right angles to the door, away from the hinges. Section 8.2-3
Rotational Dynamics To get the most effect from the least force, you exert the force as far from the axis of rotation (imaginary line through the hinges) as possible. Section 8.2-4
Rotational Dynamics Thus, the magnitude of the force, the distance from the axis to the point where the force is exerted, and the direction of the force determine the change in angular velocity. Section 8.2-5
Rotational Dynamics For a given applied force, the change in angular velocity depends on the lever arm,which is the perpendicular distance from the axis of rotation to the point where the force is exerted. Section 8.2-6
Rotational Dynamics For the door, it is the distance from the hinges to the point where you exert the force. If the force is perpendicular to the radius of rotation then the lever arm is the distance from the axis, r. Section 8.2-7
Rotational Dynamics If a force is not exerted perpendicular to the radius, however, the lever arm is reduced. Section 8.2-8
Rotational Dynamics The lever arm, L, can be calculated by the equation, L = r sin θ, where θ is the angle between the force and the radius from the axis of rotation to the point where the force is applied. Section 8.2-9
Rotational Dynamics Torque is a measure of how effectively a force causes rotation. The magnitude of torque is the product of the force and the lever arm. Because force is measured in newtons, and distance is measured in meters, torque is measured in newton-meters (N·m). Section 8.2-10
Rotational Dynamics Torque is represented by the Greek letter tau, τ. Section 8.2-11
Lever Arm A bolt on a car engine needs to be tightened with a torque of 35 N·m. You use a 25-cm long wrench and pull on the end of the wrench at an angle of 60.0° from the perpendicular. How long is the lever arm, and how much force do you have to exert? Section 8.2-12
Lever Arm Step 1: Analyze and Sketch the Problem Section 8.2-13
Lever Arm Sketch the situation. Section 8.2-14
Lever Arm Find the lever arm by extending the force vector backward until a line that is perpendicular to it intersects the axis of rotation. Section 8.2-15
Lever Arm Find the lever arm by extending the force vector backward until a line that is perpendicular to it intersects the axis of rotation. Section 8.2-16
Lever Arm Identify the known and unknown variables. Known: r = 0.25 m θ = 60.0º Unknown: L = ? F = ? Section 8.2-17
Lever Arm Step 2: Solve for the Unknown Section 8.2-18
Lever Arm Solve for the length of the lever arm. L = r sin Section 8.2-19
Lever Arm Substitute r = 0.25 m, θ = 60.0º L = (0.25 m)(sin 60.0°) = 0.22 m Section 8.2-20
Lever Arm Solve for the force. Section 8.2-21
Lever Arm Substitute τ = 35 N·m, r = 0.25 m, θ = 60.0º Section 8.2-22