Download
1 / 50
650 likes | 961 Vues
El procesador. DEFINICIÓN. El procesador es un circuito integrado que contiene todos los elementos necesarios para conformar una unidad central de procesamiento. En la actualidad este componente electrónico está compuesto por millones de transistores integrados en una misma placa de silicio.

E N D
DEFINICIÓN El procesador es un circuito integrado que contiene todos los elementos necesarios para conformar una unidad central de procesamiento. En la actualidad este componente electrónico está compuesto por millones de transistores integrados en una misma placa de silicio.
INDICE Evolución histórica Tipos Modos de funcionamiento
EVOLUCIÓN HISTÓRICA Comenzó siendo del tamaño de un armario, después se redujo al de una gran caja y luego se construyó en una placa de 15 por 15 pulgadas. Finalmente se construyó en un solo circuito integrado, encapsulado en un "chip", que se inserta en un zócalo de la placa-base.
La historia de los procesadores ha pasado por diferentes situaciones. Desde el primer procesador Intel 4004 del año 1971, hasta los actuales de cuatro núcleos Core 2 Extreme y Core 2 Quad del año 2008, los procesadores han evolucionado mucho.
El primer procesador fue presentado el 15 de noviembre de 1971. Fue el Intel 4004. Poseía unas características únicas para su tiempo.
INTEL 4004 Características: • Velocidad del reloj: 100 KHz • Ancho de bus: 4 bits • Máximo bytes de memoria: 640 bytes • Velocidad de CPU: 750 KHz • Socket: 16 pin DIP Para entonces era una auténtica joya.
El diseño del Intel 4004 era muy eficaz para ser empleado en calculadoras y dispositivos de control. Existen incluso unos pocos viejos sistemas de control de semáforos en uso construidos con el Intel 4004.
El Intel 4004, naturalmente, es uno de los chips coleccionables antiguos más codiciados del mundo. Los que más valor tienen son los 4004 de color oro y blanco. En el 2004, cada uno de esos chips alcanzaron alrededor de 400 dólares en eBay.
Entre sus aplicaciones podemos destacar su presencia en la calculadora Busicom, así como tener los primeros tintes de inteligencia a objetos inanimados. Sin embargo el 1 de Abril de 1972 Intel anunciaba una versión mejorada de su procesador, el Intel 8008.
INTEL 8008 Características: • Velocidad del bus: 8 bits • Memoria direccionable: 16 Kb • Transistores: 3500 (casi el doble de su procesador) • Velocidad de CPU: 0.5 - 0.8 MHz • Socket: 18 pin DIP
Justo dos años después (1 de abril de 1974), Intel anunciaba ese tan esperado ordenador personal, el Altair.
Este ordenador costaba unos 400 dólares de la época. El procesador suponía multiplicar por 10 el rendimiento del anterior, gracias a sus 2 MHz de velocidad con una memoria de 64 Kb. El Altair 8800 fue un microordenador diseñado en 1975, basado en la CPU Intel 8080A.
Se vendía como un kit a través de la revista Popular Electronics. Los diseñadores planearon vender solo unos pocos cientos de ejemplares a los aficionados y se sorprendieron al vender diez veces esa cantidad solo en el primer mes.
Hoy en día el Altair es ampliamente reconocido como la chispa que condujo a la revolución del ordenador personal durante los años siguientes. El bus del ordenador diseñado para el Altair se convirtió en un estándar conocido como el bus S-100. El primer lenguaje de programación para la máquina fue el Altair BASIC, escrito por Bill Gates y Paul Allen, quienes inmediatamente después fundarían Microsoft. Indice
TIPOS Procesadores AMD Procesadores AMD Procesadores Intel Procesadores Intel Indice
Duron: Socket A • Admite un controlador memoria de doble canal, pero depende del chipset. Debido al diseño de bus/reloj síncrono, será incapaz de aprovechar más del 50% del ancho de banda. • No puede ejecutar código de 64 bits. • Se ofrece principalmente con 64 KB de caché L2. • Versión más rápida: 1,80 GHz • Overclocability: cor refrigeración por aire, hasta 2,20 GHz. Con refrigeración líquida, hasta 2,50 GHz. • Placa base recomendada: La Abit NF7-S 2.0 es la mejor para procesadores Athlon XP.
Athlon XP: Socket A • Admite un controlador memoria de doble canal, pero depende del chipset. Debido al diseño de bus/reloj síncrono, será incapaz de aprovechar más del 50% del ancho de banda. • No puede ejecutar código de 64 bits. • Se ofrece principalmente con 256 KB de caché L2. • Versión más rápida: 2,20 GHz • Overclocability: por refrigeración de aire, hasta 2,40 GHz. • Placa base recomendada: La Abit NF7-S 2.0 es la mejor para procesadores Athlon XP.
Sempron: Socket 754 • No permite usar memoria en configuración de doble canal. La arquitectura del Socket 754 mueve el controlador de memoria al interior del procesador, por lo que debe ser éste quien la soporte, y AMD no ha sacado ninguna versión para que lo haga. • No puede ejecutar código de 64 bits. • Se ofrece únicamente con 256 KB de caché L2. • Versión más rápida: 1,80 GHz • Overclockability: no hay informes. • Placa base recomendada: la DFI LanPartyUT NF3 250 GB
Athlon 64: Socket 939 • Puede trabajar en configuración de memoria dual. En controlador integrado para Socket 939 permite trabajar en configuración single y dual channel. • Es capaz de trabajar en tres modos: 32 puro, 64 puro y 32/64 simultáneo. • Se ofrece principalmente con 256 KB de caché L2. • Overclockability: con las nuevas versiones con núcleo Winchester se han conseguido velocidades de 2,50 GHz. • Placa base recomendada: la EPoX 9NDA3
Athlon FX: Socket 939 • Puede trabajar en configuración de memoria dual. En controlador integrado para Socket 939 permite trabajar en configuración single y dual channel. • Es capaz de trabajar en tres modos: 32 puro, 64 puro y 32/64 simultáneo. • Se ofrece únicamente con 1 MB de caché L2. • Versión más rápida: 2,60 GHz • Overclockability: este procesador en las pruebas realizadas nunca superó los 2,70 GHz. • Placa base recomendada: la EPoX 9NDA3
Opteron: Socket 940 • Puede trabajar en configuración de memoria dual. En controlador integrado para Socket 940 permite trabajar en configuración single y dual channel. • Es capaz de trabajar en tres modos: 32 puro, 64 puro y 32/64 simultáneo. • Se ofrece únicamente con 1 MB de caché L2. • Versión más rápida: 2,4 GHz. • Overclockability: con las nuevas versiones no se han conseguido velocidades superiores a 2,60 GHz. • Placa base recomendada: la Tyan Thunder K8W (S2885).
Intel Core 2 Duo El Core 2 Duo es un procesador con un pipeline de 14 etapas, lo que le permite escalar más en frecuencia que su antecesor directo: el Core, que tenía 12 etapas al igual que el Athlon 64. Tiene además, un motor de ejecución ancho con tres ALUs, cuatro FPUs y tres unidades de SSE de 128 bits. Estas dos características hacen que sea el procesador x86 que más instrucciones por ciclo puede lograr.
Una llamativa característica de esta familia es su particular facilidad para aplicar el overclock, llegando muchos de estos procesadores a ganancias superiores al 50% en su frecuencia de trabajo. Otra diferencia es la forma como trabajan sus núcleos: en Pentium los núcleos trabajan de manera alterna, mientras que en el Core 2 los núcleos trabajan de manera simultánea dando un mayor rendimiento.
Intel Core 2 Quad Intel Core 2 Quad es una serie de procesadores de Intel con 4 núcleos, lanzados el 2 de Noviembre de 2006, asegurando ser un 65% más rápidos que los Core 2 Duo disponibles entonces. Para poder crear este procesador se tuvo que incluir 2 núcleos Conroe bajo un mismo empaque y comunicarlos mediante el Bus del Sistema, para así totalizar 4 núcleos reales.
Inicialmente el Core 2 Quad fue lanzado exclusivamente en los mercados desktop y server, debido principalmente a su alto consumo de energía (desde los 95W entonces).
MODOS DE FUNCIONAMIENTO Modo real Modo protegido Modo virtual Multiproceso Overclocking Hyperthreading Indice
Modo real El modo real es un modo de operación del Intel 80286 y posteriores CPUs compatibles de la arquitectura x86. El modo real está caracterizado por 20 bits de espacio de direcciones segmentado (significando que solamente se puede direccionar 1 MB de memoria), acceso directo del software a las rutinas del BIOS y el hardware periférico, y no tiene conceptos de protección de memoria o multitarea a nivel de hardware. Todos los CPUs x86 de las series del 80286 y posteriores empiezan en modo real al encenderse el ordenador.
x86 es la denominación genérica dada a ciertos microprocesadores de la familia Intel, sus compatibles y la arquitectura básica a la que estos procesadores pertenecen, por la terminación de sus nombres numéricos: 8086, 80286, 80386, 80486, etc. Son comúnmente conocidos por versiones abreviadas de sus nombres, como 286 ó i286, 386 ó i386… etc. El Intel 80286 es compatible con esta arquitectura. Modos
Modo protegido El modo protegido es un modo operacional de los CPUs compatibles x86 de la serie 80286 y posteriores. El modo protegido tiene un número de nuevas características diseñadas para mejorar las multitareas y la estabilidad del sistema, como protección de memoria, y soporte de hardware para memoria virtual así como de conmutación de tareas. En el 80386 y procesadores de 32 bits posteriores se agregó un sistema de paginación que es parte del modo protegido.
La mayoría de los sistemas operativos x86 modernos corren en modo protegido, incluyendo Linux, FreeBSD, OpenBSD, NetBSD, y Microsoft Windows 3.0 y posteriores. Modos
Modo virtual En el microprocesador 80386 y posteriores, el modo 8086 virtual (también llamado modo real virtual o VM86) permite la ejecución de aplicaciones de modo real que violan las reglas bajo control de un sistema operativo de modo protegido. El VM86 usaba la forma de segmentación del modo real, pero usaba la dirección resultante de 20 bits (realmente 21 bits), tratándola como una dirección lineal, de tal manera que era sujeta a paginación. Era usado para ejecutar programas DOS en Microsoft Windows/386, Windows 3.x, Windows 95, Windows 98, Windows Me, y OS/2 2.x y más adelante, a través de las máquinas DOS virtuales, también en SCO UNIX a través de Merge, y en Linux por medio de dosemu. Modos
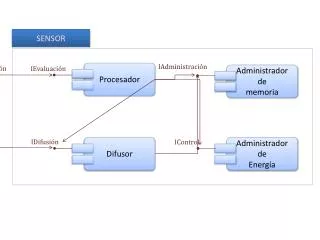
Multiproceso Multiproceso es tradicionalmente conocido como el uso de múltiples procesos concurrentes en un sistema en lugar de un único proceso en un instante determinado. La industria informática ha tenido siempre un objetivo primordial, la búsqueda de la velocidad y obviamente, la velocidad va ligada a las prestaciones. Por lo general, la velocidad ha sido la principal medida para decidirse por un sistema u otro. Sin embargo, por muy evidente que parezca, las prestaciones pueden no estar forzosamente ligadas a la velocidad. Hoy en día es posible construir sistemas, que aún teniendo procesadores más "lentos" que otros, ofrezcan unas prestaciones significativamente superiores. Son los sistemas multiprocesador, que como su denominación indica, incorporan varios procesadores para llevar a cabo las mismas funciones. Modos
Overclocking Overclock es un anglicismo de uso habitual en informática. Literalmente significa “sobre el reloj”, es decir, aumentar la frecuencia de reloj del CPU. El overclocking pretende alcanzar una mayor velocidad de reloj para un componente electrónico (por encima de las especificaciones del fabricante). La idea es conseguir un rendimiento más alto gratuitamente aunque esto pueda suponer una pérdida de estabilidad o acortar la vida útil del componente.
Este aumento de velocidad produce un mayor gasto energético, y por lo tanto, una mayor producción de calor residual en el componente electrónico. El calor puede producir fallos en el funcionamiento del componente y se debe combatir con diversos sistemas de refrigeración (por aire con ventiladores, por agua o con una célula Peltier unida a un ventilador). A veces, los fallos producidos por esta práctica, pueden dañar de forma definitiva el componente, otras veces, pueden producir un reinicio que conlleva la pérdida de datos de las aplicaciones abiertas, o en algún caso, la pérdida del sistema de archivos entero.
Esta práctica está muy extendida entre los usuarios de informática más exigentes, que tratan de llevar al máximo el rendimiento de sus ordenadores. Los consumidores menos atrevidos suelen comprar componentes informáticos de bajo coste, forzándolos después y alcanzando así el rendimiento esperado por los componentes de gama más alta. Por otro lado, los consumidores más fanáticos pueden llegar a adquirir componentes de última generación para forzar su funcionamiento, y conseguir así pruebas de rendimiento inalcanzables para cualquier equipo de consumo. Por este motivo, la mayoría de los fabricantes decide no incluir en la garantía de su hardware los daños producidos por overclockearlos.
Resumiendo: El overclocking puede hacer que nuestro ordenador rinda más con un coste mínimo. De esta manera, podremos retrasar la compra de un ordenador nuevo y comprar uno mejor que el que teníamos por el mismo precio. Modos
Hyperthreading La tecnología HyperThreading es un diseño de la empresa Intel que permite al software programado para ejecutar múltiples hilos procesar los hilos en paralelo dentro de un único procesador, incrementando el uso de las unidades de ejecución del procesador. Esta tecnología consiste en usar dos procesadores lógicos dentro de un único procesador físico. El resultado es una mejoría en el uso del procesador, ya que al simular dos procesadores puede aprovechar mejor los recursos de éste y por lo tanto una mejora en la velocidad de las aplicaciones. Según Intel la mejora que se obtiene es aproximadamente de un 30%.
De todos modos, las aplicaciones que pretendan aprovechar la capacidad de la tecnología HyperThreading deben haber sido programadas para utilizar múltiples hilos, de lo contrario no se conseguirá el paralelismo en la ejecución que se pretende. Resumiendo: Hyperthreading le hace creer al usuario mediante el sistema operativo que tiene dos microprocesadores (si el sistema operativo lo soporta) cuando en realidad tiene un solo microprocesador. Simula una placa base con doble microprocesador. Esto permite procesar tareas más rápido, la velocidad aumenta pero el usuario notará una mejora de 20%.