Download
1 / 85
880 likes | 1.31k Vues
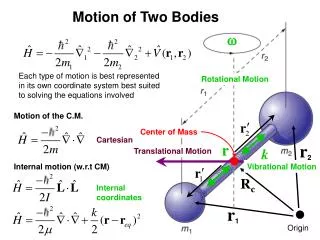
18_12afig_PChem.jpg. Motion of Two Bodies. w. Each type of motion is best represented in its own coordinate system best suited to solving the equations involved. Rotational Motion. Motion of the C.M. Center of Mass. Cartesian. r. r 2. k. Translational Motion. Internal motion (w.r.t CM).

E N D
18_12afig_PChem.jpg Motion of Two Bodies w Each type of motion is best represented in its own coordinate system best suited to solving the equations involved Rotational Motion Motion of the C.M. Center of Mass Cartesian r r2 k Translational Motion Internal motion (w.r.t CM) Vibrational Motion Rc Internal coordinates r1 Origin
Motion of Two Bodies Centre of Mass Weighted average of all positions Internal Coordinates: In C.M. Coordinates:
Kinetic Energy Terms ? ? ? ? ? ? ? ?
Centre of Mass Coordinates Similarly
Centre of Mass Coordinates Reduced mass
Hamiltonian Separable! C.M. Motion 3-D P.I.B Internal Motion Rotation Vibration
Rotational Motion and Angular Momentum We rotational motion to internal coordinates Linear momentum of a rotating Body p(t1) p(t2) Ds f Angular Velocity Parallel to moving body Always perpendicular to r Always changing direction with time???
Angular Momentum p v f m r w Perpendicular to R and p L Orientation remains constant with time
r R Center of mass Rotational Motion and Angular Momentum As p is always perpendicular to r Moment of inertia
r R Center of mass Rotational Motion and Angular Momentum
r R Center of mass Rotational Motion and Angular Momentum Classical Kinetic Energy
r R Center of mass Rotational Motion and Angular Momentum Sincer and p are perpendicular
Momentum Summary Classical QM Linear Momentum Energy Rotational (Angular) Momentum Energy
Two-Dimensional Rotational Motion Polar Coordinates y r f How to we get: x
Two-Dimensional Rotational Motion product rule
Two-Dimensional Rotational Motion product rule
Two-Dimensional Rigid Rotor Assume ris rigid, ie. it is constant As the system is rotating about the z-axis
18_05fig_PChem.jpg Two-Dimensional Rigid Rotor
18_05fig_PChem.jpg Two-Dimensional Rigid Rotor
18_05fig_PChem.jpg Two-Dimensional Rigid Rotor Periodic m = quantum number
18_05fig_PChem.jpg Two-Dimensional Rigid Rotor
Two-Dimensional Rigid Rotor m 18.0 12.5 E 8.0 4.5 2.0 0.5 Only 1 quantum number is require to determine the state of the system.
Orthogonality m = m’ m ≠ m’ 18_06fig_PChem.jpg
14_01fig_PChem.jpg Spherical Polar Coordinates ?
14_01fig_PChem.jpg Spherical Polar Coordinates
14_01fig_PChem.jpg The Gradient in Spherical Polar Coordinates Gradient in Spherical Polar coordinates expressed in Cartesian Coordinates
14_01fig_PChem.jpg The Gradient in Spherical Polar Coordinates Gradient in Cartesian coordinates expressed in Spherical Polar Coordinates
14_01fig_PChem.jpg The Gradient in Spherical Polar Coordinates
14_01fig_PChem.jpg The Gradient in Spherical Polar Coordinates
14_01fig_PChem.jpg The Laplacian in Spherical Polar Coordinates Radial Term Angular Terms OR OR
Three-Dimensional Rigid Rotor Assume ris rigid, ie. it is constant. Then all energy is from rotational motion only.
18_05fig_PChem.jpg Three-Dimensional Rigid Rotor Separable?
Three-Dimensional Rigid Rotor k2= separation Constant Two separate independent equations
18_05fig_PChem.jpg Three-Dimensional Rigid Rotor Recall 2D Rigid Rotor
18_05fig_PChem.jpg Three-Dimensional Rigid Rotor This equation can be solving using a series expansion, using a Fourier Series: Legendre polynomials Where
Three-Dimensional Rigid Rotor Spherical Harmonics
The Spherical Harmonics For l=0, m=0
The Spherical Harmonics For l=0, m=0 Everywhere on the surface of the sphere has value what is ro ? r = (ro, q, f)