Download

1 / 17
170 likes | 344 Vues
Kinodynamic Motion Retiming for Humanoid Robots. Stéphane Caron 中 , Yoshihiko Nakamura 中 , Quang-Cuong Pham 光 中 Nakamura-Takano Laboratory, The University of Tokyo, Japan 光 School of Mechanical and Aerospace Engineering, Nanyang Technological University, Singapore.

E N D
KinodynamicMotionRetimingforHumanoidRobots Stéphane Caron中, Yoshihiko Nakamura中, Quang-CuongPham光 中 Nakamura-Takano Laboratory, The University of Tokyo, Japan 光 School of Mechanical and Aerospace Engineering, Nanyang Technological University, Singapore
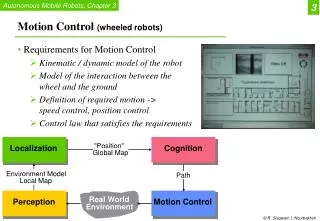
Whole-body Humanoid Motions Constraints: • Maintain contact (e.g. ZMP) • Avoid slippage (e.g. friction) • Limited actuated torques Stage: • Controller • Motion Planner Strategy: • Path Planning • Trajectory Retiming
Trajectory Retiming Outline: • Fix a path • Project system dynamics in 1D • Enforce constraints on 1D system Complete system: • State variables: • Linear equations: matrix vector Projected system: • State variables: • Linear equations: vector scalar
Time-Optimal Path Parameterization TOPP Algorithm: minimum-time trajectory when all system constraints can be expressed as: Two chapels: • Direct Integration • Faster computations • Numerical stability issues • Convex Optimization • Any cost function • More numerical stability?
Positive Contact Pressure ZMP Criterion The ground projection of the ZMP lies in the support polygon, i.e. Or equivalently: Example: [Suleiman et al. (2010)]
Slippage Avoidance Frictional Contact Points Restrict tangential forces at specific contact points to avoid slippage: Or equivalently: Example: [Hauser (2014)]
Torque Constraints Actuated-torques From the equations of motion, and given the contact forces : Limited motor power: , i.e. Example: [Righetti et al. (2013)]
Contribution Reduction of all three constraints to: Before: • ZMP: only square supports • Slippage: convex optimization only • Torque limits: idem After: • ZMP: arbitrary polygons • Slippage: analytical expressions • Torque limits: idem Pro: faster computations (general) Con: linear approximation (this paper)
Experimental validation Platform: HRP4 Input motion: • Quasi-statically stable (CoM) • Duration: 53 seconds Solver: TOPP [Pham (2014)] https://github.com/quangounet/TOPP Output motion: • Duration: 24 seconds (2x faster) • In simulation: 12.3 seconds (4x faster)
Experiment in motion OriginalMotion Retimed Motion
Conclusion • Topic:Trajectory Retiming for Humanoids under Kinodynamic Constraints • ZMP: generalized to arbitrary polygonal areas • Slippage & Torques: first-time application to Direct Integration TOPP (not convex optimization) Faster computations • Experiment: successful 2x speedup on the real HRP4 (4x in simulations)
References [Hauser (2014)] K. Hauser (2014).Fast Dynamic Optimization of Robot Paths under Actuator Limits and Frictional Contact. ICRA 2014. [Pham (2014)] Q.-C. Pham (2014). A general, fast, and robust implementation of the time-optimal path parameterization algorithm. To appear in IEEE Transactions on Robotics. [Righetti et al. (2013)] L. Righetti, J. Buchli, M. Mistry, M. Kalakrishnan, & S. Schaal (2013). Optimal distribution of contact forces with inverse-dynamics control. The International Journal of Robotics Research, 32(3), 280-298. [Suleiman et al. (2010)] W. Suleiman, F. Kanehiro, E. Yoshida, J.-P. Laumond, & A. Monin (2010). Time parameterization of humanoid-robot paths. IEEE Transactions on Robotics, 26(3), 458-468.
You are entering theExtra-Slides Section Venture there at your own risk.
Derivation of Contact Constraints Problem: project on actuated space, i.e. separate torques and contact forces Projection on unactuated joint space: All solutions: Issue: how to enforce ? For a given position , needs to be enforced for every .
Derivation of Contact Constraints (cont’d) All solutions: Our method: • Solve with for only three points • Linear approximation of from these three points Any solution to the approximate system is solution to the original one, but the converse is not true.