Download
1 / 16
160 likes | 280 Vues
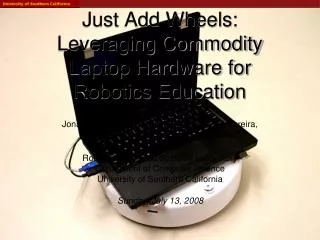
Just Add Wheels: Leveraging Commodity Laptop Hardware for Robotics Education. Jonathan Kelly, Jonathan Binney , Arvind Pereira, Omair Khan and Gaurav S. Sukhatme. Robotic Embedded Systems Laboratory Department of Computer Science University of Southern California. Sunday, July 13, 2008.

E N D
Just Add Wheels: Leveraging Commodity Laptop Hardware for Robotics Education • Jonathan Kelly, Jonathan Binney, Arvind Pereira, Omair Khan and Gaurav S. Sukhatme Robotic Embedded Systems Laboratory Department of Computer Science University of Southern California Sunday, July 13, 2008
Introduction • We propose using commodity laptop hardware for robotics education. • We motivate the approach by discussing relevant studies and statistics. • We then describe our prototype laptop robot, including software based on the open source Player-Stage package. • We present results from monocular SLAM and bump detection experiments, using laptop sensors.
Talk Outline • Introduction • Motivation • Leveraging Laptop Hardware for Education • The “LapBot”, a Prototype Laptop Robot • Monocular SLAM • Bump Sensing • Conclusions and Future Work
Motivation • Robotics projects are fun and exciting – excellent for learning about physics, math, computer science etc. • Can be used to motivate students who may not otherwise choose to pursue Science or Engineering (Blank 2006). • Numerous barriers to widespread adoption of robotics curriculum, however, at both college and K-12 levels. • Include lack of teacher training, suitable educational resources, and affordable robot platforms(Mataric et al. 2007).
Leveraging Laptop Hardware • How can we both interest students in robotics, and get them involved at reasonably low cost? • Need mobility, sensor and software components. • Idea: Leverage sensors and computing power inside the laptops that they already own. • 2007 ECAR survey: 73.7% of college students now own laptops. • Cameras already available in many models, accelerometers on some (Acer, Apple, IBM).
Our Approach • Explore the idea of using student-owned laptops as capable robot platforms. • Use on-board hardware (e.g. camera, accelerometer etc.) for sensing and computing. • “Just add wheels”, i.e. a motorized base, for mobility. • Develop an open source software platform, freely available, to take advantage of this hardware.
The LapBot • Prototype hardware / software platform. • Apple MacBook Core Duo laptop • iRobot Create mobile base • Runs (free) Ubuntu Linux. • Software for two tasks: • Monocular SLAM using the built-in iSight camera. • Bump sensing / obstacledetection using accelerometer.
MonoSLAM • We use a freely-available monocular (single-camera) SLAM package (Davison 2003). • Full 6-DoF SLAM running in real time. • Requires initialization using known calibration target. • Image data is acquired from internal iSight camera. • Grabs frames on the MacBook Core Duo at 5 – 10 Hz. • 640 x 480 VGA resolution. • Works qualitatively very well.
Bump Sensing • Access the on-board Apple Sudden Motion Sensor. • High-resolution, high-speed three-axis solid-state accelerometer unit. • 250 counts per gravity. Sampled at more than 300 Hz. • No official API from Apple (yet), but reading data is easy. • Repurpose the sensor for bump/collision detection. • Threshold test on smoothed sensor output. > 0.4 g’s is a considered a bump. • Currently, robot emits an auditory tone when bumped.
The LapBot in Action • Video shows student driving the LapBot manually in our lab building. • Display support holds screen (and camera) rigidly upright – this aides feature tracking.
Conclusions • Described and motivated the design of a prototype laptop robot built to leverage hardware that is likely available (or will be available) to students. • Both MonoSLAM and accelerometer-based bump sensing work well, and run in real-time on laptop processor. • One of the benefits of using a full laptop instead of an embedded processor. • Emphasize that all hardware except for locomotion is built into the laptop itself.
Future Work • Continuing to develop out-of-the-box software packages for a variety of laptop hardware. • User should be able to install with minimal effort, i.e. the package has to ‘just work’. • Trial in a classroom environment. • Presently, we have a simple proof-of-concept implementation. • Need to carefully evaluate the feasibility of the approachfor a real classroom. • Ideally, this would be a freshman college class. K-12 would come later.