
Comparative Analysis of Error Reduction and Elbow Torque in Time-Independent Functional Training Groups
This study compares mean error reductions and elbow torque applied by robots during training blocks in time-independent and time-dependent groups. It shows that error decreases in time-independent subjects over 8 blocks but remains unchanged in time-dependent subjects. Elbow torque values demonstrate the minimum required for optimal performance in each training mode. The research explores retraining arm coordination post-stroke using robot-assisted time-independent functional training.

Comparative Analysis of Error Reduction and Elbow Torque in Time-Independent Functional Training Groups
E N D
Presentation Transcript
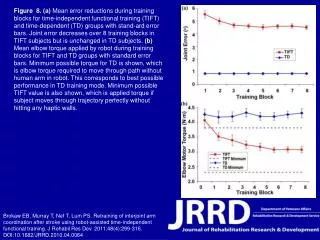
Figure 8.(a) Mean error reductions during training blocks for time-independent functional training (TIFT) and time-dependent (TD) groups with stand-ard error bars. Joint error decreases over 8 training blocks in TIFT subjects but is unchanged in TD subjects. (b) Mean elbow torque applied by robot during training blocks for TIFT and TD groups with standard error bars. Minimum possible torque for TD is shown, which is elbow torque required to move through path without human arm in robot. This corresponds to best possible performance in TD training mode. Minimum possible TIFT value is also shown, which is applied torque if subject moves through trajectory perfectly without hitting any haptic walls. Brokaw EB, Murray T, Nef T, Lum PS. Retraining of interjoint arm coordination after stroke using robot-assisted time-independent functional training. J Rehabil Res Dev. 2011;48(4):299-316.DOI:10.1682/JRRD.2010.04.0064