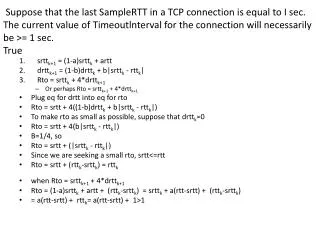
Rovinné křivky
490 likes | 1.14k Vues
Technická mechanika 9.přednáška. Rovinné křivky. Technická mechanika 9.přednáška. Euklidova geometrie je nejstarší částí geometrie.

Rovinné křivky
E N D
Presentation Transcript
Technická mechanika 9.přednáška Rovinné křivky
Technická mechanika 9.přednáška Euklidova geometrie je nejstarší částí geometrie. Euklidovská (někdy také elementární nebo Euklidova) geometrie je založena na definicích a axiomech, které publikoval Euklides v publikaci označované jako Základy. Euklides se v Základech věnuje nejen geometrii, ale také měření a teorii čísel. Geometrie však byla jeho axiomatickým přístupem ovlivněna pravděpodobně nejvíce, proto dnes bývá Euklides spojován především s rozvojem geometrie. Euklides se zabýval pouze geometrii rovinnou, tzv. planimetrií. (prostorová, tzv. stereometrie). Euklides zavádí 23 definic, v nichž se pokouší definovat pojmy jako bod, čára, přímka apod. Např. uvádí, že bod je to, co se nedá rozdělit, čára nemá žádnou šířku atd. Z dnešního pohledu nejsou některé z Euklidových definic považovány za definice, neboť se snaží definovat pojmy, které jsou nedefinovatelné. Mezi takové pojmy patří např. bod nebo přímka, které moderní matematika nedefinuje, ale považuje je za dané. Křivka je geometrický jednorozměrný objekt. Jednoduchý příklad křivky je například kružnice nebo přímka. V geometrii existuje velké množství různých křivek.
Technická mechanika 9.přednáška • Euklidovská geometrie je založena na pěti postulátech (axiomech) definovaných Euklidem, z nichž lze všechny další pojmy logicky odvodit. • Postulát je jedním ze základních pojmů logiky, přírodních věd (zejména fyziky) i filozofie a označuje výchozí předpoklad jako pravdivý. Jeho pravdivost přitom není logicky dokazována ani dokazatelná. Pojem postulátu je často užíván zejména ve fyzice, kde je v podstatě synonymem pojmu axiom. • (pozn.: základním postulátem, který je probírán již v nejnižších ročnících základní školy, je 1 + 1 = 2. Odtohoto pravidla se dále odvíjí veškeré základy elementární aritmetiky). • Máme-li dány dva body, existuje jedna přímka, která jimi prochází. • Konečnou přímou čáru (úsečku) můžeme prodloužit tak, že vznikne opět úsečka. • Je možné nakreslit kružnici s libovolným středem a poloměrem. • Všechny pravé úhly jsou si rovny. • K danému bodu a přímce lze sestrojit právě jednu rovnoběžku, která prochází daným bodem. (tzv. postulát rovnoběžnosti)
Technická mechanika 9.přednáška Křivka je geometrický jednorozměrný objekt. Jednoduchý příklad křivky je například kružnice nebo přímka. V geometrii existuje velké množství různých křivek. Rovinnou křivkou rozumíme body [x,y], které leží v rovině xy (v kartézském systému souřadnic).Rovnici rovinné křivky lze často vyjádřit ve formě funkční závislosti proměnných x,y, tzn. y = f(x), Přímka je jednorozměrný základní geometrický útvar. Lze ji popsat jako nekonečně tenkou, nekonečně dlouhou, dokonale rovnou křivku . Speciální případ přímky je osa. Směrnicová rovnice přímky má tvar y = kx + q , kde k = tg je tzv. směrnice přímky, přičemž je orientovaný úhel s vrcholem v průsečíku přímky a první souřadnicové osy, jehož rameny jsou (kladně orientovaná) první osa souřadnicové soustavy a přímka, a q je tzv. úsek (vyťatý přímkou) na ose y, což je druhá souřadnice průsečíku přímky s osou y. Pro k > 0 představuje rovnice přímky rostoucí funkci, pro k < 0 jde o klesající fci. Pro k = 0 je přímka rovnoběžná s osou x. Je-li q = 0, pak přímka prochází počátkem O.
Technická mechanika 9.přednáška • Úseková rovnice přímky má tvar • kde p 0 je úsek (vyťatý přímkou) na ose x a q 0 je úsek (vyťatý přímkou) na ose y. • Přímku rovnoběžnou s osou x nebo y nelze úsekovou rovnicí vyjádřit.
Technická mechanika 9.přednáška Kuželosečka je rovinná křivka, která vznikne jako průnik roviny s pláštěm rotačního kuželu (tzv.kuželová plocha), přičemž rovina neprochází jeho vrcholem.
Technická mechanika 9.přednáška Kružnice Protínáme-li kužel rovinou kolmou na osu symetrie rotačního kuželu, výslednou kuželosečkou je kružnice - množina všech bodů v rovině, které leží ve stejné vzdálenosti, označované jako poloměr, od pevně daného bodu, zvaného střed. Kružnice jsou jednoduché uzavřené křivky, rozdělující rovinu na vnitřek a vnějšek. y • V kartézském souřadném systému (x, y) je kružnice se středem (x0, y0) a poloměrem r množina všech bodů (x, y) vyhovujících rovnici • Pokud se střed kružnice nachází v počátku souřadnic (0, 0), lze tento vzorec zjednodušit na • Kružnice se středem v počátku souřadnic a poloměrem 1 se nazývá jednotková kružnice. S[x0,y0] x • Délka kružnice a její poloměr jsou přímo úměrné, stejně jako obsah jí určeného kruhua čtverec poloměru kružnice. • (Pozn.: koeficienty úměrnosti je 2π respektive π; jinými slovy r je poloměr a d průměr). • Délka kružnice (obvod kruhu):o = 2πr = πd • Obsah kruhu:
Technická mechanika 9.přednáška Protínáme-li kužel rovinou, která svírá s osou symetrie rotačního kuželu úhel menší než 90° a větší než polovina vrcholového úhlu kuželu, výslednou kuželosečkou je elipsa. Rovina přitom protíná všechny povrchové přímky pláště kužele a není tedy s žádnou z nich rovnoběžná. Elipsa je uzavřená křivka v rovině. Všechny body elipsy mají stejný součet vzdáleností od dvou pevně zvolených bodů — ohnisek. Úsečku spojující libovolný bod na elipse s ohniskem nazýváme průvodič. Spojíme-li ohniska úsečkou, její střed je střed elipsy. Nejdelší spojnice středu elipsy a bodu na elipse se nazývá velká poloosa nebo též hlavní poloosa. Nejkratší taková spojnice je malá poloosa nebo vedlejší poloosa.
Technická mechanika 9.přednáška • V kartézských souřadnicích lze v normální poloze elipsu se středem v počátku vyjádřit rovnicí • kde a je délka hlavní poloosy, b je délka vedlejší poloosy a [x,y] jsou souřadnice libovolného bodu elipsy. Veličina se nazývá excentricita elipsy (výstřednost) a vyjadřuje vzdálenost ohniska od středu elipsy.
Technická mechanika 9.přednáška Trojúhelníková konstrukce Je zadán střed S, osy o1 a o2, velikosti poloos a (hlavní), b (vedlejší). Postup Sestrojíme soustředné kružnice v bodě S kružnice k1 a k2, které mají poloměry velikosti a a b. Vedeme libovolnou polopřímku p vycházející z bodu O. Pak bod M je průsečíkem přímek p1 a p2: zároveň platí, že p1 || o1, p2 || o2.Bod M1 je průsečík přímky p1 s kružnicí k1.Bod M2 je průsečík přímky p2 s kružnicí k2.Bod M (a všechny body takto sestrojené) se nachází mezi kružnicemi k1 a k2 nebo přímo na kružnicích (v případě hlavních a vedlejších vrcholů). k1 k2 p2 p1 p S o1 o2
Technická mechanika 9.přednáška Proužková rozdílová kostrukce Elipsa je určena hlavní osou o1, hlavními vrcholy A a B a bodem M, který bude ležet na elipse, ale není vrcholem elipsy. o1
Technická mechanika 9.přednáška Používá se i součtová konstrukce, kterou můžete vidět na obrázku.
Technická mechanika 9.přednáška Rytzova kostrukce os Elipsa je dána dvojicí omezených sdružených průměrů MN a RQ. Postup Sestojíme přímku p kolmou k jednomu ze sdružených průměrů (např. RQ, tak aby procházela středem S (průsečík sdružených průměrů). Vzdálenost |RS| je shodná se vzdáleností |SP|, bod P leží na přímce p. Proložíme přímku body PM.Najdeme střed O úsečky PM. Sestrojíme kružnici k o poloměru |OS|. Průsečíky kružnice k s přímkou určenou body P, O a M nazveme 1 a 2. Sestrojíme přímku procházející průsečíkem 1 a středem S a přímku procházející průsečíkem 2 a středem S. Tyto přímky jsou na sebe kolmé a leží na nich osy elipsy. Velikost hlavní a vedlejší poloosy získáme ze vzdáleností |2M| a |M1|.
Technická mechanika 9.přednáška Protínáme-li kužel rovinou rovnoběžnou právě s jednou z povrchových přímek pláště kuželu, výslednou kuželosečkou je parabola. V[m, n] – vrchol paraboly o souřadnicích m, nF – ohnisko parabolyd – řídicí přímkao – osa paraboly|DF| = p – velikost parametru, X[x, y] – libovolný bod, náležící parabole • Kanonický (normální) tvar rovnice paraboly v normální poloze (osa paraboly je rovnoběžná s osou x a vrchol V = [x0,y0]) v kartézských souřadnicích je: • Pro p > 0 je parabola otevřená doprava a pro p < 0 je parabola otevřená doleva. Pro x0 = 0,y0 = 0 dostaneme parabolu s vrcholem v počátku souřadnic. • Ohnisko takto zadané paraboly má souřadnice: • a řídicí přímka je určena rovnicí:
Technická mechanika 9.přednáška Protínáme-li kužel rovinou, která svírá s osou symetrie rotačního kuželu úhel menší než polovina vrcholového úhlu kuželu, výslednou kuželosečkou je hyperbola; přitom rovina je rovnoběžná právě se dvěma povrchovými přímkami kuželu. Hyperbolaje rovinná křivka, kuželosečka s výstředností větší než 1. Lze ji také definovat jako množinu všech bodů v rovině o daném rozdílu vzdáleností od dvou pevných ohnisek. Hyperbola také tvoří graf funkcey = 1 / xv kartézské soustavě souřadnic. S[x0, y0] - střed hyperboly o souřadnicích x0, y0F1, F2 - ohniska hyperbolyA, B - vrcholy hyperbolyo1 - hlavní osa hyperbolyo2 - vedlejší osa hyperbolyp1, p2 - asymptoty hyperboly - délka hlavní poloosy - délka vedlejší poloosy -excentricita - délka hlavní osy - délka vedlejší osy X[x, y] - libovolný bod náležící hyperbole
Technická mechanika 9.přednáška Cassiniovy křivky Křivky nesou jméno italsko - francouzského astronoma a inženýra Jeana Dominica Cassiniho (1625–1712) a jsou definovány jako množina bodů X v rovině, které mají od dvou pevných bodů F1, F2 (ohnisek) konstantní součin vzdáleností: |XF1| . |XF2| = a2 Cassini se domníval, že po jedné z těchto křivek obíhá Země kolem Slunce. Umístíme-li ohniska do soustavy souřadnic tak, že F1 = [−c, 0 ], F2 = [c, 0 ], c > 0 je rovnice Cassiniovy křivky: (x2 + y2)2 + 2c2(y2 − x2) = a4 − c4. Podle vztahu mezi čísly a, c dostaneme různé tvary křivek. Je-li a < c, vyjdou dvě křivky obemykající ohniska
Technická mechanika 9.přednáška Lemniskáta Pro a = c dostaneme křivku, která má své vlastní jméno - lemniskáta (z řeckého (lemniskos = smyčka). Lemniskátu vykreslují křidélka letící mouchy, přibližně ji opisují meandrující řeky, oblouky lemniskáty najdeme rovněž u železničních přechodnic. Jestliže a > c, Cassiniova křivka už sama sebe neprotíná, ale může být ještě „prohnutá“. Pro a ≥ √2c prohnutí mizí a Cassiniova křivka se podobá elipse.
Technická mechanika 9.přednáška Descartesův list (René Descartes (čti Dekart) 1596–1650, francouzský filosof a matematik)Křivka Descartesův list je vyjádřenarovnicí: x3 + y3 = 3axy, kde a 0, ale může být kladné i záporné. Na obrázku je Descartesův list pro a > 0. Pro a < 0 bychom dostali křivku osově souměrnou podle přímky y = −x s křivkou z obr. • Myslím, tedy jsem(latinsky „Ego cogito, ergo sum“)
Technická mechanika 9.přednáška Pascalova závitnice Křivka je pojmenována podle velkého francouzského matematika, fyzika a filosofa 17. století Blaise Pascala (1623 -1662). Jak ji dostaneme. Ve zvolené soustavě souřadnic sestrojíme kružnici k (nazývá se řídící) o poloměru r = a, který procházípočátkem a střed mna ose x. Z počátku vedeme polopřímku tak, aby protnula kružnici, průsečnici označíme A. Na polopřímku naneseme na obě strany od bodu A vzdálenost ba získáme body C,B. Množina všech takto sestrojených bodů je Pascalova závitnice.
Technická mechanika 9.přednáška Spirály Spirála je rovinná křivka, kterou opisuje bod P na přímce p otáčející se kolem pevného bodu O ∈ p, přičemž vzdálenost |OP| = ρ se zadaným způsobem mění. Ukážeme si tři spirály: Archimedovu, hyperbolickou a logaritmickou. P O Pokud se bod pohybuje po přímce rovnoměrně, pak jeho vzdálenost je úměrná úhlu, tzn. délka průvodiče bodu spirály roste lineárně s argumentem. Taková spirála se nazývá Archimédovou spirálou. ρ = k, kde k > 0 je koeficient úměrnosti Body dvou sousedních závitů na stejném paprsku jsou od sebe vzdáleny o 2πa. Části dvou protichůdných Archimedových spirál tvoří obrys součástky, který umožňuje převádět otáčivý pohyb na posuvný tam a zpět (vačka).
Technická mechanika 9.přednáška Hyperbolická spirála Zatímco u Archimédovy spirály je průvodič přímo úměrný argumentu, u hyperbolické spirály je tomu naopak; průvodič bodu spirály je nepřímo úměrný jeho argumentu. Rovnice Spirály v polárních souřadnicích je a > 0, φ R. Spirála má zajímavé asymptotické chování: pro φ → 0 se body spirály blíží k přímce y = a, pro φ → ∞ se délka průvodiče bodů blíží k nule.
Technická mechanika 9.přednáška • U logaritmické spirály se bod pohybuje tak, že dráhy které urazí za stejné časové úseky, tvoří geometrickou posloupnost. Logaritmická spirála protíná všechny přímky vycházející z počátku pod stejným úhlem . Logaritmickou spirálu lze vyjádřit rovnicí • ρ = aek, • kde a,k jsou kladná čísla, přičemž platí cotg = k . Logaritmická spirála Logaritmická spirála má zajímavou vlastnost (naznačenou na obrázku); všechny polopřímky vycházející z počátku protínají pod stejným úhlem (neboli tečna a průvodič v libovolném bodě svírají konstantní úhel ). Toho se využívá v technické praxi např. u rotujících nožů, ozubených kol, atd., tvar logaritmické spirály mají rovněž některé jistící pomůcky pro horolezce (tzv. abalaky a friendy).
Technická mechanika 9.přednáška Evolventa kružnice Tuto křivku si můžeme představit jako dráhu koncového bodu napnuté niti, odvíjející se z kružnice (pokud bychom odvíjeli nit z jiné křivky, dostali bychom evolventu této křivky.) S odvíjením začínáme na kružnici (bod A), napnutá niť má směr tečny ke kružnici. Potom délka oblouku kružnice AB je rovna délce úsečky BC. Jestliže střed kružnice umístíme do počátku, pak parametrické rovnice evolventy kružnice jsou: x = r cos t + rt sin t y = r sin t − rt cos t, kde t ∈ R, r je poloměr kružnice.
Technická mechanika 9.přednáška S evolventou kružnice se můžeme setkat např. na atletickém oválu. Startovní čára totiž není úsečka, ale část evolventy, aby všichni závodníci měli (nebo mohli mít) stejně dlouhou trať. Závodníci běží po tečně k okraji vnitřní dráhy. Pokud startovní čára (červená křivka) je část evolventy, mají závodníci A, B, C stejně dlouhou trať.
Technická mechanika 9.přednáška Cykloidy
Necháme-li kružnici kutálet po přímce, bude pevně zvolený bod (C) na kružnici opisovat křivku zvanou cykloida. Prostou cykloidu lze vyjádřit parametrickými rovnicemi:x = a(t − sint) y = a(1 − cost) kde a je poloměr kružnice a parametrt odpovídá délce oblouku kotálející se kružnice. Perioda cykloidy je 2πa. Délka oblouku dané větve prosté cykloidy od vrcholu do bodu [x,y] je s = 8a Obsah plochy ohraničené jednou větví prosté cykloidy je S = 3πa2 Poloměr první křivosti ve vrcholu je r = 4a Technická mechanika 9.přednáška
Prodloužená a zkrácená cykloida Jestliže na úsečku SC položíme polopřímku SC a na ní vytvoříme bod D - dostaneme tak tzv. zkrácenou nebo prodlouženou cykloidu podle toho, leží-li bod D uvnitř nebo vně úsečky SC. Pokud bod pevně spojený s kotálející se kružnicí neleží na obvodu této kružnicebod D), ale jeho vzdálenost od středu kružnice o poloměru a je SD, pak pro SD< a získáme cykloidu zkrácenou a pro SD > acykloidu prodlouženou. Parametrické rovnicezkrácené, resp. prodloužené cykloidy lze zapsat ve tvaru:x = at − dsint , y = a − dcost Technická mechanika 9.přednáška
Technická mechanika 9.přednáška Cykloida, epicykloida a hypocykloida
Tečna a normála cykloidy Tečnu dostaneme z “velmi krátké” tětivy. Přidáme-li do obrázku cykloidy ještě jednu kružnici, která se odvalila o 1,5 cm dále do bodu B1, i s příslušným bodem cykloidy C1 a spojením bodů C a C1 dostaneme tětivu. Zmenšováním zvoleného čísla (1,5) až na velmi malou hodnotu, např. 1 mikron, tj. 0,0001 cm pozorujeme, jak se přímka CC1 mění v tečnu. Technická mechanika 9.přednáška
Sestrojením kolmice k této tečně v bodě C - se zanedbatelnou opticky nerozlišitelnou chybou dostaneme normálu. Změnou polohy bodu B zjistíme,že normála prochází vždy bodem B a tečna bodem souměrně sdruženým s bodem B podle středu S (“nejvyšší” bod valící se kružnice). Technická mechanika 9.přednáška
Technická mechanika 9.přednáška (Epi)(Hypo)cykloidy Epicykloidy
Jestliže necháme valit kružnici místo po přímce po kružnici (po její vnější straně), opisuje bod valící se kružnice epicykloidu. Technická mechanika 9.přednáška Pevná kružnice je vždy modrá, ta, co se kutálí, je žlutá.
Technická mechanika 9.přednáška Epicykloidy pro různé hodnoty parametrů a, b(poloměr pevné a kutálející se kružnice).
Technická mechanika 9.přednáška Hypocykloidy
Hypocykloidu vytvoří bod pevně spojený s kružnicí, která se valí (kutálí) po vnitřní straně nehybné kružnice. Technická mechanika 9.přednáška Použijeme-li jako parametr úhel odvalení t, pak lze parametrické rovnice prosté hypocykloidy zapsat ve tvaru kde a je poloměr nehybné kružnice a b je poloměr kružnice hybné.
Takhle to vypadá, je-li poloměr pevné kružnice menší než poloměr kutálející se kružnice. Technická mechanika 9.přednáška
Technická mechanika 9.přednáška Když se spojí do jednoho obrázku epicykloida a hypocykloida a trochu se to přibarví, může vzniknout třeba následující obrázek.
Technická mechanika 9.přednáška Řetězovka
Řetězovkaje jednou z velmi rozšířených rovinných křivek, která má význam v technice a stavebnictví. Zavěsíte-li řetěz (nebo ohebné nepružné lano) mezi dva sloupky, jejichž vzdálenost je menší než délka řetězu, zaujme řetěz v gravitačním politvar tzv.řetězovky - katenoidy, podobně jako dráty na stožárech vysokého napětí, šňůra na prádlo atd. Technická mechanika 9.přednáška
Její parametrické rovnice jsou x = t/r, y = r(cos ht − 1)a protože platí ... (cos ht = et + e−t), pak tato křivka je grafem funkce f (x) = a (e x /a + e -x /a) / 2 kde exponenciála má základ e = 2,718. . . a . . . je konstanta různá od nuly. Technická mechanika 9.přednáška Tvar křivky pro různé hodnoty parametru a
Technická mechanika 9.přednáška Spirály, cykloida a řetězovka
Technická mechanika 9.přednáška Historie řetězovky Slovo řetězovka je odvozeno z latinského slova slabika – tzn. “řetěz.” Je to křivka, kterou vytvoří dokonale ohebné lano (řetěz) při zavěšení v krajních bodech. Poprvé použil termín „řetězovka“ („catenary“) Huygensv roce 1690. Touto křivkou zabývali Leibniz, Huygens a Johann Bernoulli (rok 1691). Pomocí funkce f (x) popsal řetězovku Jakub Bernoulli (1654-1705). Vlastnostmi zavěšených řetězů se zabýval již dříve Leonardo da Vinci (1452-1519).
Technická mechanika 9.přednáška Katalánský architekt Antoni Gaudí rozsáhle využil samonosných catenary tvarů v jeho katedrále Sagrada Familia Chrám Sagrada Familia se nachází na východním pobřeží ve španělské Barceloně. Stavební práce na něm začaly v roce 1884 a trvají dodnes. Chrám je hlavní stavbou slavného architekta Antonia Gaudího, ten převzal projekt ve velmi raném stadiu (v roce 1891), jeho přístup k architektuře je však velmi individuální a nekonvenční. Místo přesných projektů zhotovoval neostré skicy. V roce 1926 však zemřel a ukázalo se nemožné pokračovat ve stavbě v jeho duchu.
Technická mechanika 9.přednáška Sagrada Familia
Technická mechanika 9.přednáška Řetězovka je odolná vůči rozkmitání do strany, proto si tento tvar vybírali stavitelé středověku ke stavbě mostních oblouků! Tvar řetězovky můžeme pozorovat i u řetězových mostů z 19. a 20. století. Statika i dynamika stavebních konstrukcí využívá této samonosnosti při navrhování lanových střech nebo kotvení štíhlých konstrukcí Základy oblouku mají tvar rovnostranných trojúhelníků (dole 16,46 m a 5,18 m nahoře); je postaven z nerezové oceli a betonu. Bránový oblouk v Sant Louisve státě Missouri má tvar převrácené řetězovky – catenary(630 stop široký a 630 stop vysoký).