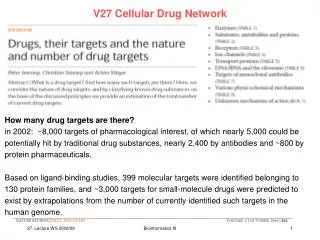
Helicopter UAV Control System Development: Building, Testing, and Safety Measures
This project involves the development of a control system for a 48” Align T-REX 600 ESP electric helicopter, focusing on elevator, aileron, collective, and rotational velocity control. The Helicommand 3A stabilization system is utilized, with a risk assessment, crash prevention strategies, and progressive build process. Emphasis on testing and fail-safes for autonomous flight with potential loss of link.

Helicopter UAV Control System Development: Building, Testing, and Safety Measures
E N D
Presentation Transcript
Cellular Network UAV Nic McDonald Grant Ayers
One Major Update… ALIGN TREX 600 ESP Electric Helicopter Length: 48” Flying Weight: 5.4 lbs. Payload: ~3 lbs.
USB USB Serial Serial PWM Analog I2C Serial PWM I2C
Controlling a Helicopter • Elevator (cyclic pitch) • Aileron (cyclic role) • Collective (rotor pitch) • Also on tail • Rotational velocity • Also on tail Helicommand 3A Stabilization
Risks Prevention Crash Progressive build process. Testing, testing, testing! Loss of link and high latency Design aircraft software for autonomous flight. Use fail safes (timed hover and land) for complete link loss. Interface to helicopter is only theoretically known. Get the hardware figured out early. Testing the interface thoroughly before flight. Not 100% sure we’ll get the helicopter and stabilization kit Beg, borrow, and steal!